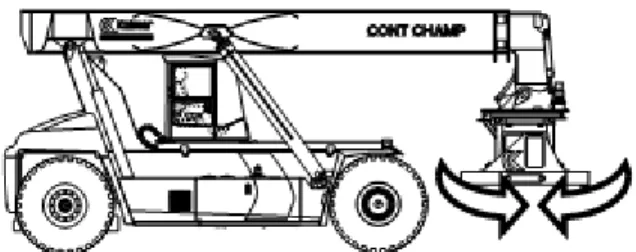
Buồng lái của xe có thể dịch chuyển về phía trước để tăng tầm nhìn cho người lái nhờ hệ thống xi lanh thủy lực. Nghiêng khung xe nâng 1.1.2 Thông số kỹ thuật xe nâng container KALMAR DRF 450.
Thông số kỹ thuật của hệ thống điện cấp nguồn và điều khiển
Có bảo vệ các cực trong mạch cấp nguồn đầu vào, ngắn mạch đầu vào và đầu ra không gây hư hỏng. Bộ điều khiển truyền động TCU - Điện áp nguồn: Mạch cấp nguồn 24V.
Giới thiệu các thiết bị điều khiển
Vị trí các thiết bị điều khiển trong cabin điều khiển
Chức năng của tay điều khiển chính
THIẾT BỊ ĐIỆN - ĐIỆN TỬ CÔNG TRÌNH XE NÂNG Kalmar DRF 450 CONTAINER.
TRANG BỊ ĐIỆN - ĐIỆN TỬ CÁC CƠ CẤU LÀM VIỆC CỦA XE NÂNG HÀNG CONTAINER KALMAR DRF 450
Trang bị điện - điện tử cơ cấu nâng - hạ cần
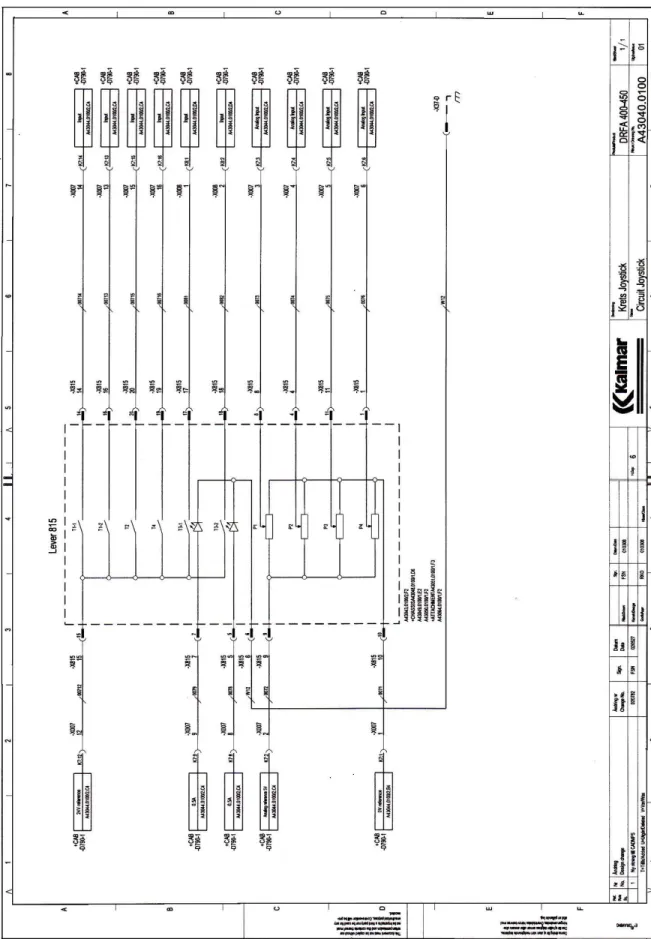
- Sơ đồ điện nguyên lý cơ cấu nâng - hạ cần
- Chức năng các phần tử Lever 815 : tay điều khiển
- Các bảo vệ
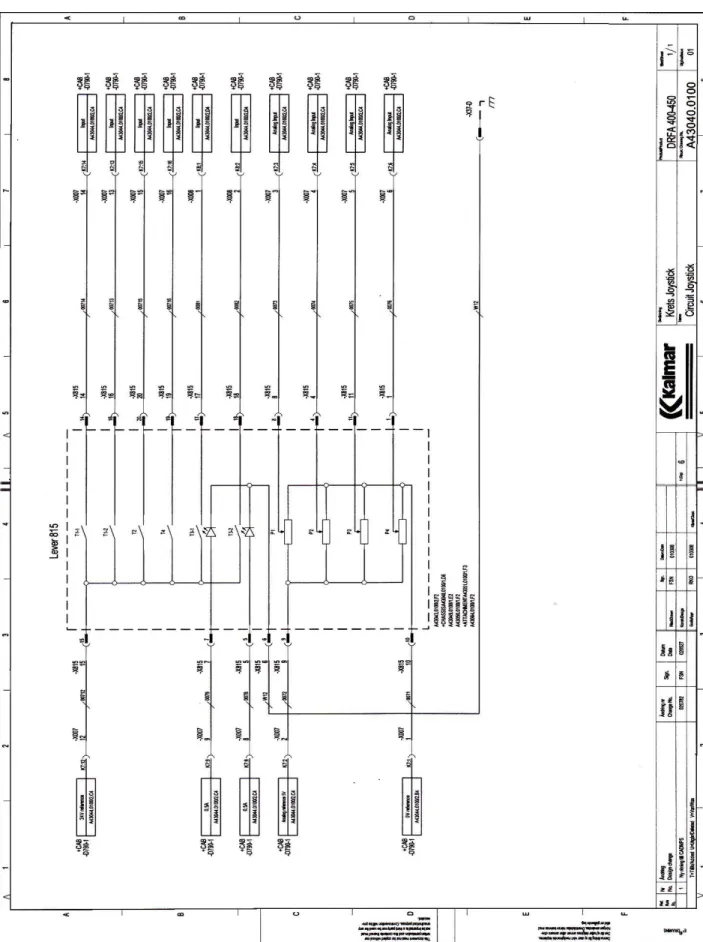
- Sơ đồ điện nguyên lý cơ cấu co - giãn cần
- Chức năng các phần tử Lever 815 : tay điều khiển
- Nguyên lý hoạt động
P4: Biến trở cung cấp tín hiệu điều khiển cơ cấu rung khung nâng (lựa chọn). KDU-R xử lý tín hiệu rồi cung cấp tín hiệu analog (U=24V) để điều khiển van từ đường dầu tái sinh Y6046 đến mở, giúp cung cấp thêm dầu áp lực cho đường dầu giãn nở cần, tăng tốc độ giãn nở cần.
Trang bị điện - điện tử cơ cấu quay khung nâng
- Sơ đồ điện nguyên lý cơ cấu quay khung nâng
- Chức năng các phần tử Lever 815 : tay điều khiển
- Nguyên lý hoạt động
Tùy theo vị trí tay điều khiển mà ta có thể lấy vị trí biến trở P2 sẽ có mức tín hiệu điều khiển cao hay thấp (từ 3.0V – 4.5V), tín hiệu ra điều khiển van điện từ có dòng điện giá trị 380 mA (van điện từ sẽ mở nhỏ nhất và tốc độ giãn nở phải chậm nhất) đến giá trị dòng điện tối đa là 650 mA (van từ sẽ mở lớn nhất và tốc độ giãn nở phải nhanh nhất). Việc điều khiển cơ cấu quay khung nâng cũng được thực hiện bằng cách điều khiển van servo quay khung nâng. KDU nhận tín hiệu số từ KCU, sau đó xử lý và cung cấp van từ để điều khiển chuyển động quay theo chiều kim đồng hồ của khung nâng (Y6008), tín hiệu điều khiển analog (U=24V).
Đồng thời, KCU cũng gửi tín hiệu đến bộ điều khiển thân sau KDU-R (D797-R) KDU-R nhận và xử lý tín hiệu và cung cấp tín hiệu điều khiển (U=24V) đến van điện từ để điều khiển mở. Và KDU-R nhận và xử lý tín hiệu đồng thời cung cấp tín hiệu điều khiển analog (U=24V) đến van điện từ điều khiển việc mở chức năng thủy lực của tời nâng Y6003.
Trang bị điện - điện tử cơ cấu dịch khung nâng
- Sơ đồ điện nguyên lý cơ cấu dịch khung nâng
- chức năng các phần tử Lever 815 : tay điều khiển
Lúc này, áp suất dầu thủy lực được cung cấp cho động cơ thủy lực và làm quay khung nâng theo chiều kim đồng hồ. Tùy vào độ sâu của nút mà ta có thể lấy được vị trí biến trở P3 sẽ là mức tín hiệu điều khiển từ 3.0V đến 4.5V, tín hiệu ra từ KDU điều khiển van điện từ có giá trị dòng điện từ là 380mA (van) Van từ sẽ mở nhỏ nhất và tốc độ quay khung sẽ chậm nhất) đến giá trị dòng điện cực đại là 650mA (van từ sẽ mở lớn nhất và tốc độ quay khung sẽ lớn nhất). Khi bạn thả tay ra khỏi nút điều khiển quay khung nâng, giá trị điện áp tín hiệu sẽ là: 2.0V - 3.0V, các van điện từ điều khiển quay khung nâng (Y6008) và (Y6009) sẽ mất tín hiệu điều khiển, đường dầu áp suất sẽ Nguồn điện bị ngắt khỏi động cơ thủy lực khiến khung nâng dừng lại.
Nhấn nút điều khiển xoay khung bên phải, chiết áp P3 cấp tín hiệu điều khiển (điện áp tín hiệu điều khiển: 2.0V - 0.5V) đến bộ điều khiển cabin KCU, KCU xử lý tín hiệu rồi truyền đến các đơn vị KDU và KDU. -R,KDU nhận tín hiệu, xử lý và cấp tín hiệu điều khiển analog (U=24V) tới van điều khiển để xoay khung nâng ngược chiều kim đồng hồ (Y6009). Đồng thời, KCU cũng truyền tín hiệu đến bộ điều khiển thân sau KDUR-R (D797-R). KDU-R tiếp nhận xử lý tín hiệu và cung cấp tín hiệu điều khiển (U=24V) đến van điện từ để điều khiển chức năng mở Khung nâng thủy lực Y6003.
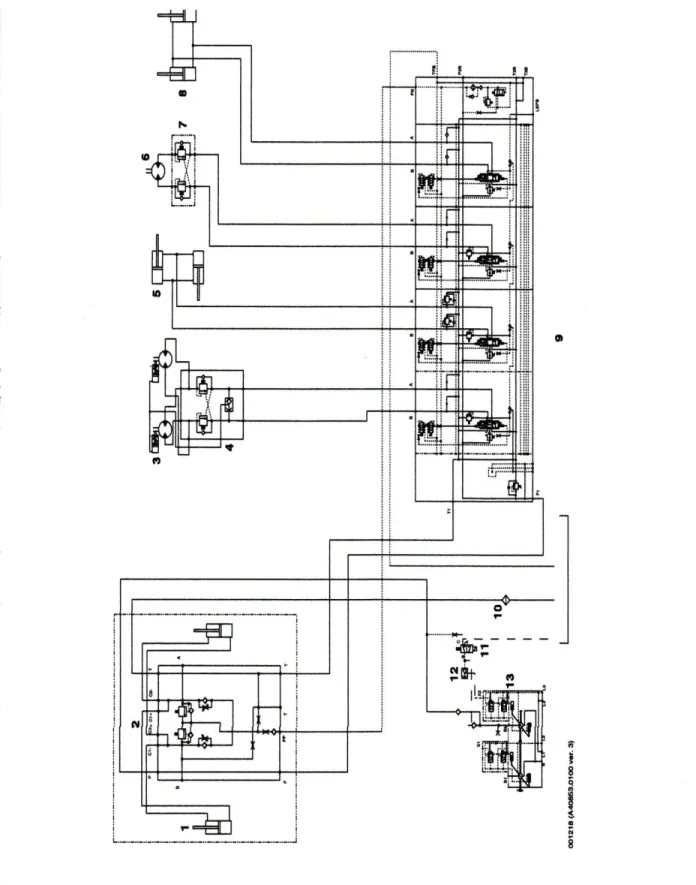
GIỚI THIỆU CHUNG VỀ HỆ THỐNG THUỶ LỰC CỦA XE
Các bơm thủy lực ở bên trái (bơm chính 1 và bơm chính 2) cung cấp hệ thống van cho cơ cấu nâng hạ và cần dẫn vào, đồng thời cho các cơ cấu khung nâng. Các bơm thủy lực ở bên phải (bơm chính 3 và bơm chính 4) cung cấp hệ thống điều khiển, bộ trợ lực và các van cho cơ cấu nâng hạ và vào/ra. Van ưu tiên sẽ đảm bảo luôn có áp suất trong hệ thống điều khiển và tạm thời ngắt dòng chảy tới các van nâng hạ và xử lý van đầu vào bên phải của máy bơm.
Một bơm thủy lực cố định (bơm ở vị trí 5) cung cấp cho hệ thống phanh, hệ thống này hoạt động hoàn toàn độc lập với hệ thống thủy lực phía trên, bơm này sẽ cung cấp cho ắc quy thủy lực thông qua van hút. Bơm thủy lực cố định (vị trí bơm 6) có nhiệm vụ bơm dầu thủy lực qua bể làm mát và hệ thống lọc để làm mát rồi thả vào thùng dầu.
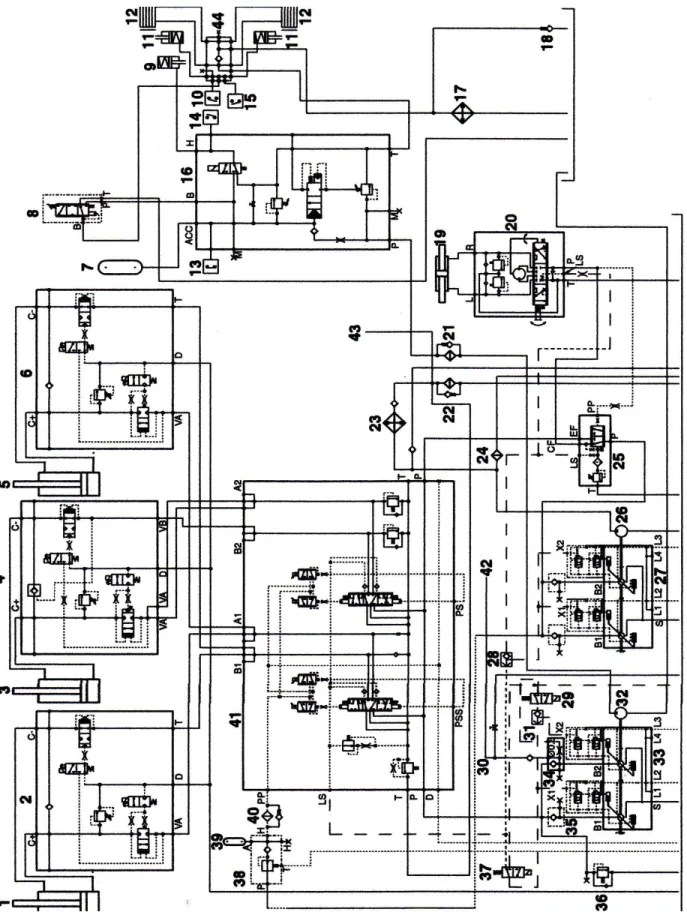
Sơ đồ hệ thống thuỷ lực thân xe
- Chức năng các phần tử
Khi tín hiệu điều khiển điện được cung cấp cho cuộn dây van điện từ nâng cần, đường dầu servo được mở thông qua van servo nâng cần và tác dụng vào đầu trên của van thủy lực chính để nâng và hạ cần xuống thấp hơn và đẩy cần và trượt khay chính xuống. Từ cổng B1 của cụm van (41), dầu thủy lực chảy qua khay van chính, qua van một chiều đến đường dầu tại cửa LS. Phần lớn dầu thủy lực trên dòng LS đi về dòng dầu T và quay về thùng dầu, trong khi một phần áp suất được sử dụng để phản ứng với áp suất dầu của cảm biến tải (LS).
Khi tín hiệu điều khiển điện được cấp đến cuộn dây của van hạ cần, đầu servo được mở thông qua van servo hạ cần và tác dụng vào đầu dưới của van chính thủy lực trên cơ cấu nâng hạ cần (thông qua cửa PSS) . ) đẩy thanh trượt của ngăn chính lên. Từ cổng A1 dầu thủy lực sẽ đi qua khay van chính tới đường T, một phần dầu sẽ đi qua van một chiều về đường dầu cổng LS.
Sơ đồ hệ thống thuỷ lực điều khiển khung nâng
- Chức năng các phần tử
Dầu thủy lực cao áp từ cổng P1 của cụm van (9) sẽ được mở qua van một chiều, qua van chính quay khung về cổng A của cụm van (9) và đến van khóa của động cơ xoay khung hình (4). Một phần áp suất dầu từ đường dây sẽ dùng để mở van an toàn đường hồi dầu (nối vào cổng B) của động cơ thủy lực (van đóng đường dầu khi khung không quay), lượng dầu này quay về qua cửa an toàn. van đến cửa B của cụm van (9). Dầu thủy lực cao áp từ cổng P1 của cụm van (9) sẽ được mở qua van một chiều, qua van chính quay khung đến cổng B của cụm van (9) và đến van khóa của cụm van (9). động cơ quay khung (4).
Một phần áp suất dầu từ đường B dùng để mở van an toàn hồi dầu (nối với cổng A) của động cơ thủy lực. Van chuyển hướng nhận áp suất dầu từ đường dầu có áp suất cao hơn để mở phanh (3) của cơ cấu quay khung.
GIỚI THIỆU PHẦN MỀM MÔ PHỎNG AUTOMATION STUDIO
Bắt đầu làm việc với Automation Studio (A.S)
Để bắt đầu làm việc với A.S, nhấp đúp vào biểu tượng A.S trên màn hình nền. Trong menu Menu có các phần: Tệp, Chỉnh sửa, Xem, Chèn, Bố cục, Mô phỏng, Công cụ, Cửa sổ và Trợ giúp. Trong file có các phần giúp tạo dự án mới, mở hoặc đóng dự án, sơ đồ, lưu, in, báo cáo, cho phép chèn vào bảng vật liệu. Hóa đơn vật liệu (BOM) hoặc tài liệu báo cáo.
Edit: cho phép cắt dán, Undo (Undo), xóa, chọn tất cả (Select All),...Ngoài ra: Thuộc tính thành phần trong Edit cho phép xem, chọn lọc và chỉnh sửa các thông tin liên quan đến phần được chọn trong dự án. có thể xem, lựa chọn và chỉnh sửa các thông tin liên quan đến tài liệu. View: có chức năng phóng to, thu nhỏ bản đồ để dễ dàng xem và thiết kế bản đồ.
Simulation Toolbar (Thanh công cụ mô phỏng)
Normal (bình thường) - mô phỏng mạch ở tốc độ bình thường
Slow Motion (chuyển động chậm) - mô phỏng mạch ở tốc độ chậm nhất
Pause (ngắt mô phỏng) E: Stop (dừng mô phỏng)
Insert Toolbar (công cụ chèn)
Selection – cho phép chọn một phần tử trong vùng làm việc
Links – tạo liên kết công nghệ
Line – vẽ đường thẳng
Rectangle – vẽ hình chữ nhật E: Ellipse – vẽ hình elíp
Field – chèn các trường
Library Explorer (Thư viện tìm kiếm)
Tab(s) – thanh này cho phép sử dụng để lựa chọn thư viện cung cấp, cho những đòi hỏi về đồ họa trong việc giảm thiểu mức độ để tạo nên mạch
Component window: cửa sổ các phần tử của thư viện
- Khởi tạo một Project (đề án) mới
- Đặc tính phần tử: (Component Properties)
- Component Builcler: Xây dựng phần tử
- Hƣớng dẫn mô phỏng 1. Thiết kế một xy lanh
- Các cảm biến xy lanh
- Xây dựng bộ van hữu hƣớng
Để hiển thị và tùy chỉnh một thuộc tính, click vào cây cấu trúc phần tử để thực hiện điều chỉnh. Đây là dòng chứa tên của hộp thoại, theo sau là tên của mục. Điều này cho thấy sự tùy chỉnh trong trường thuộc tính của nhánh thuộc tính đã chọn.
Nút này hiển thị hoặc vô hiệu hóa vùng thuộc tính của phần tử (Dữ liệu nâng cao). Nút này cho phép bạn buộc chỉnh sửa thuộc tính.
Số cổng
- Piston
- Biểu đồ lực dẫn động ( Driving Force Curve)
- Biểu đồ trở lực
- Thông tin danh mục ( catalog )
- Thông tin dƣợc hiển thị ( Displayed catalog ) Có: component Name: tên xylanh
- Giảm giá trị ( variable assignment )
- Buider: Xây dựng
- MÔ PHỎNG HỆ THỐNG THUỶ LỰC
Các giá trị khác có thể được sử dụng bởi bộ điều khiển (thủy lực tỷ lệ), dưới dạng biến bên trong (SFC, logic hình thang) hoặc với một loại thành phần khác (van điều khiển trực tiếp). Sử dụng để di chuyển số lượng và thuộc tính điều khiển theo hướng mũi tên. Nhờ sự hướng dẫn tận tình của Thầy, Thạc sĩ Đặng Hồng Hải, cùng với sự giúp đỡ của các đồng nghiệp và sự nỗ lực của bản thân, đồ án của tôi đến nay đã hoàn thành.
Giới thiệu sơ lược về bộ điều khiển cẩu container Kalmar và hệ thống cấp điện. Đặng Hồng Hải - giảng viên Trường Đại học Hàng hải, bằng nỗ lực của mình, đồ án đã hoàn thành.