Tự động hóa, trong những năm gần đây khái niệm này đã trở nên phổ biến và không còn là khái niệm chỉ được sử dụng trong các lĩnh vực chuyên môn kỹ thuật cụ thể. Tự động hóa đã xuất hiện trong mọi lĩnh vực từ sản xuất đến vận hành đời sống hàng ngày. Mục tiêu của công nghệ tự động hóa là xây dựng một hệ thống trong đó con người là trung tâm, nơi con người đưa ra yêu cầu và mọi hoạt động đều thực hiện các yêu cầu đó, tùy theo từng lĩnh vực, từng quy trình riêng lẻ, được thực hiện bởi các hệ thống kỹ thuật cụ thể.
Trên toàn thế giới, hệ thống điều khiển tự động thông minh đã được sử dụng từ rất sớm và cho thấy những đóng góp quan trọng không thể phủ nhận. Việc điều chỉnh tốc độ bằng biến tần giúp tăng hiệu quả sản xuất, đơn giản, giảm chi phí và mang lại hiệu quả kinh tế. Để tìm hiểu thêm tôi nhận được đề tài “Nghiên cứu điều khiển tốc độ biến tần PV SERIES cho động cơ không đồng bộ xoay chiều ba pha.
NGHIÊN CỨU BIẾN TẦN GIÁN TIẾP
ĐẶT VẤN ĐỀ
Biến tần là thiết bị thay đổi tần số và điện áp với mục đích chính là thay đổi mô men xoắn để đạt được tốc độ mong muốn cho động cơ xoay chiều ba pha. Vì vậy, việc sử dụng biến tần ngày càng trở nên phổ biến ở nhiều khu vực, đặc biệt ở những khu vực có yêu cầu khắt khe về tốc độ và mô men xoắn. Ngoài ra, một số loại biến tần còn có thể khắc phục hạn chế trong khởi động động cơ so với các phương pháp khác như khởi động trực tiếp, khởi động sao-tam giác, khởi động tự ngẫu ba pha.
Về phân loại máy biến đổi ba pha có hai loại: + Bộ biến đổi trực tiếp.
BIẾN TẦN GIÁN TIẾP
- Khái niệm
- Các khâu cơ bản
- Biến tần áp
- Biến tần nguồn dòng
- Bộ biến tần gián tiếp chỉnh lƣu điều khiển
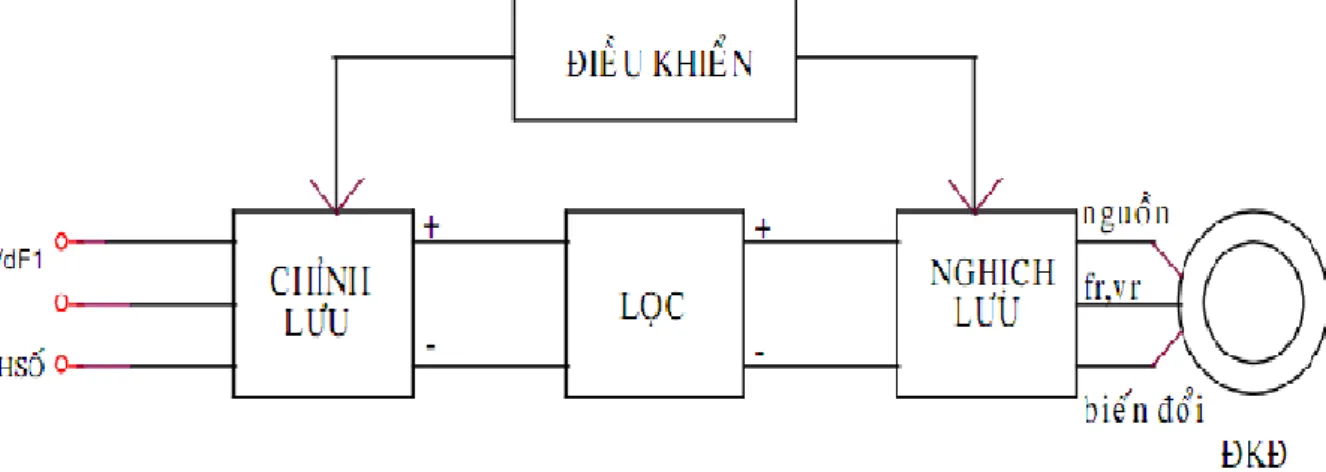
Biến tần sử dụng bộ chỉnh lưu không điều khiển có bộ chuyển đổi xung điện áp bổ sung. Biến tần sử dụng bộ chỉnh lưu không điều khiển với biến tần PW. Cấu trúc chung phần nguồn của biến tần sử dụng bộ biến tần điều khiển véc tơ (vectơ biến tần) được mô tả trên hình 1.2.
Hệ tư tưởng của FOC là: Điều khiển động cơ xoay chiều 3 pha giống như động cơ một chiều. Phương pháp điều khiển giá trị mômen trực tiếp - DTC (DTC là điều khiển vô hướng hay điều khiển véc tơ thực chất còn tùy theo quan điểm). Điều khiển tốc độ của động cơ cảm ứng bằng cách kiểm tra từ thông rôto hoặc kiểm tra dòng điện isd.
ĐỘNG ĐIỆN HỆ THỐNG BƠM,
ĐẶC ĐIỂM, CHỨC NĂNG, PHÂN LOẠI, TÍNH CHẤT CƠ BẢN
- Đặt vấn đề
- Chức năng
- Phân loại
- Các thông số chính của bơm và quạt gió
Đảm bảo hoạt động của tàu: các máy bơm phục vụ máy chính như bơm dầu bôi trơn, bơm nhiên liệu, bơm làm mát, bơm chuyển dầu, lọc và máy nén khí. Nhóm phục vụ các thiết bị động lực như: bơm nhiên liệu bôi trơn, làm mát tuần hoàn, quạt hút dầu chính. Nhóm hệ thống dịch vụ trên tàu: dằn, hầm hàng, khí khô, cứu hộ, bình chữa cháy và nước sinh hoạt.
Theo nguyên lý hoạt động của máy bơm, chúng có thể được chia thành: máy bơm ly tâm, máy bơm piston, máy bơm cánh quạt, máy bơm hướng trục, máy bơm vịt, máy bơm bánh răng... quạt cũng có quạt. Theo quy định của cơ quan đăng ký, một số máy bơm và quạt trên tàu phải được tắt từ xa (trên boong máy bay hoặc bên ngoài hành lang boong chính). Điều khiển tự động được sử dụng rộng rãi cho các nhóm tải của máy bơm, quạt, máy nén trên tàu thủy.
LƢU LƢỢNG BƠM, CÁCH XÁC ĐỊNH CÔNG SUẤT ĐỘNG CƠ
- Lƣu lƣợng bơm pittông
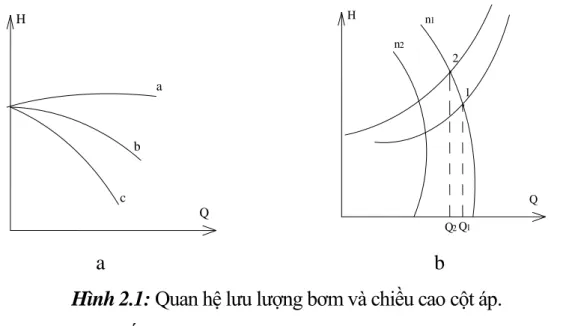
- Lƣu lƣợng bơm ly tâm: Q S .V C 1 n
- Điều chỉnh lƣu lƣợng
Ví dụ, điều chỉnh lượng nhiên liệu, chất bôi trơn, chất làm mát, nhiệt độ không khí, nước, v.v. Đây là phương pháp đơn giản, không yêu cầu thêm thiết bị kỹ thuật và cho phép điều chỉnh dòng chảy trên một khu vực rộng, bằng phẳng. Phương pháp này chỉ được sử dụng cho máy bơm quạt có động cơ không điều chỉnh được tốc độ.
Phương pháp mở cửa đẩy, cửa hút thông qua van điều chỉnh cũng được sử dụng. Điều chỉnh lưu lượng bằng cách thay đổi tốc độ động cơ: Ta biết lưu lượng của bơm và quạt phụ thuộc vào tốc độ quay. Bằng cách điều chỉnh tốc độ quay bằng các phương pháp trình bày ở Chương VII, tốc độ dòng bơm có thể được điều chỉnh.
MỘT SỐ SƠ ĐỒ ĐIẾU KHIỂN BƠM, QUẠT, MÁY NÉN
- Hệ thống máy nén khí
- Công dụng và phân loại máy nén
- Quạt gió tăng áp máy
- Giới thiệu phần tử
- Nguyên lý hoạt động
NGHIÊN CỨU PV SERIES
ĐẶT VẤN ĐỀ
Để đáp ứng nhu cầu ngày càng cao của khách hàng về tăng sản lượng và tiết kiệm điện năng tiêu thụ trong lĩnh vực công nghiệp cũng như lĩnh vực điều khiển điều hòa không khí (HVAC), Công ty Tự động hóa Công nghiệp Emerson đã ứng dụng công nghệ tiên tiến có hàm lượng trí tuệ cao vào các dòng sản phẩm PV phát triển. cho các ứng dụng điều khiển bơm quạt và nhiều ứng dụng công nghiệp khác. Trong môi trường ngày càng khắt khe và cạnh tranh, dòng sản phẩm PV hướng tới các giải pháp tiết kiệm chi phí, dễ sử dụng với hiệu suất đáng tin cậy.
GIỚI THIỆU VỀ PV SERIES
- Giới thiệu về hãng Emerson Industrial Automation
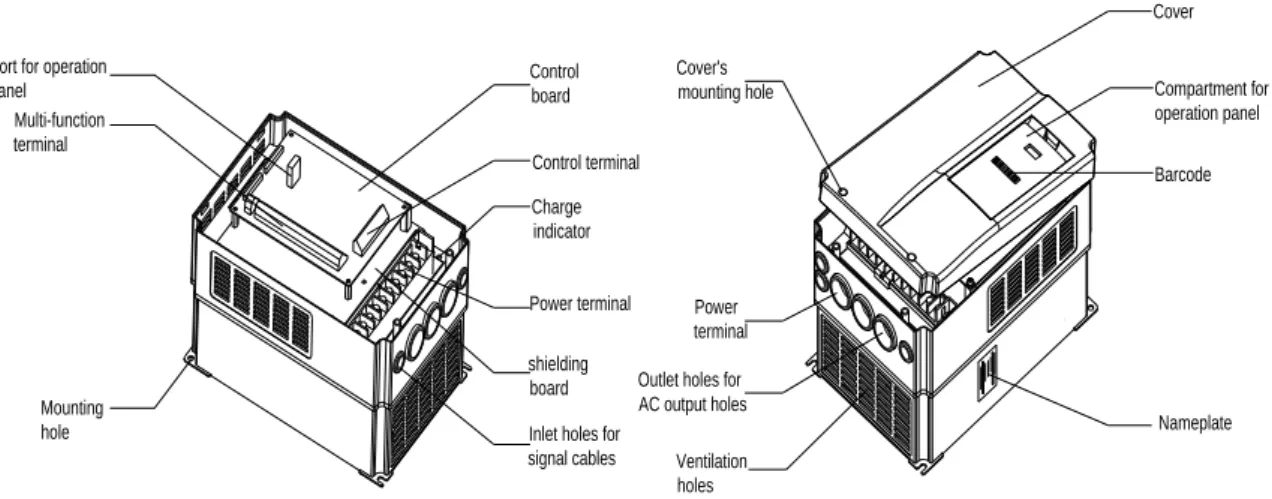
- Cấu trúc của PV SERIES
- Phân loại PV SERIES
- Giới thiệu về PV 0055
- Trạm và chức năng
- Ƣu điểm và đặc tính kỹ thuật
- Ƣu điểm
- Đặc tính kỹ thuật
Bộ biến tần PV-SERIES có thể hoạt động với động cơ ba pha ở các chế độ khác nhau. Do đó, điện trở hãm hoạt động trong thời gian ngắn và công suất bộ biến đổi có thể được chọn hoàn toàn tùy ý theo bảng 3.1. Trong đó bộ chuyển đổi có thể làm việc được với động cơ có công suất lên tới 110 (KW).
Mạch điều khiển: Bộ biến tần PV SERIES hoàn toàn có thể đáp ứng các yêu cầu khác nhau trong thiết kế mạch điều khiển, trong đó các đầu vào đầu vào cho phép tín hiệu đầu vào ở cả định dạng kỹ thuật số và analog, với 10 đầu vào kỹ thuật số và analog, 3 đầu vào analog. Sàn phía trước ổ cắm cho phép người vận hành đặt các thiết bị giám sát dòng điện, điện áp, tần số và thiết bị đo. Các vòng điều khiển khép kín như vòng hiện tại và tốc độ có thể được thiết lập trong đó.
Tín hiệu còi và đèn cũng có thể được kết nối với đầu ra bằng các cổng giao tiếp riêng biệt. Có thể chấp nhận tín hiệu điện áp analog (điện áp tham chiếu là: GND). Lớp chống nhiễu của cáp tín hiệu analog, cáp truyền thông RS485 và cáp động cơ có thể.
Có thể giảm độ ồn tổng thể bằng cách sử dụng bộ điều khiển tốc độ, đặc biệt nếu sử dụng vào ban đêm với tải định mức. Các chế độ có thể lựa chọn: cài đặt kỹ thuật số hoặc analog: điện áp/dòng điện hoặc qua cổng giao tiếp nối tiếp. Tín hiệu có thể là tần số tham chiếu hoặc tần số đầu ra.
Có thể xuất tín hiệu tần số tham chiếu hoặc tần số đầu ra.
PV SERIES ĐIỀU KHIỂN TỐC ĐỘ
- Công suất và quan điểm thiết kế
- Điều khiển
- Các kiểu điều khiển biến tần
- Chọn tham chiếu
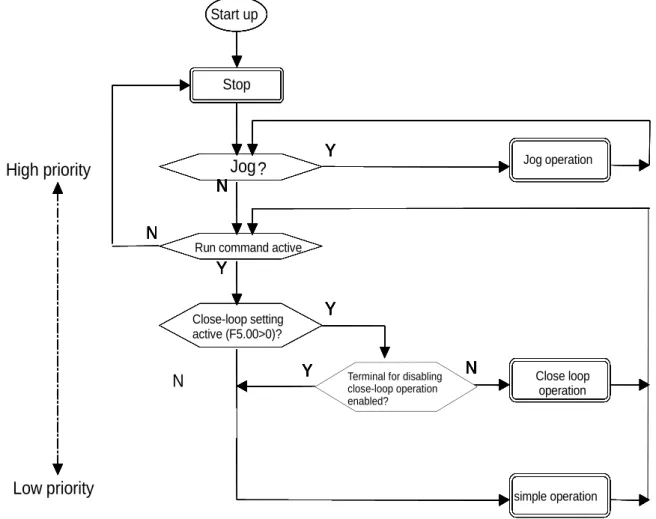
- Trạng thái hoạt động của biến tần
- Chế độ hoạt động
- Ứng dụng PV SERIES cho động cơ nén gió
- Đặt vấn đề
- Thiết lập mô hình toán hệ truyền động điện biến tần
- Động cơ không đồng bộ trên các hệ tọa độ
- Hệ điều khiển động cơ biến tần trên QC
- Các khối chức năng chính đƣợc xây dựng
Điều khiển cổng giao tiếp: Hành động START và STOP được điều khiển bởi cổng giao tiếp. Đảm bảo rằng loại điều khiển được chọn phù hợp với ứng dụng. Chọn sai loại điều khiển có thể dẫn đến hư hỏng thiết bị hoặc tử vong.
Đây là phương pháp điều khiển đơn giản khi việc thay đổi tần số dẫn đến tốc độ thay đổi. Nhưng khi thay đổi tần số dẫn đến từ thông thay đổi, từ thông của động cơ tỷ lệ thuận với tỷ lệ U/F, tức là khi thay đổi tần số sẽ kéo theo sự thay đổi về điện áp. Nhược điểm: Do động cơ điện xoay chiều ba pha có đại lượng phi tuyến với tỷ lệ U/fα =const nên quá trình điều khiển chưa tốt. Phương pháp này còn được gọi là điều khiển vectơ vì các biến điều khiển, trạng thái và đại lượng cần quan sát đều được biểu diễn dưới dạng vectơ.
Dựa vào cấu trúc của bộ chuyển đổi (Hình 3.2), chúng ta có thể thấy tín hiệu phản hồi bao gồm tín hiệu đến từ bộ mã hóa (PG) và tín hiệu dòng điện (bộ dò dòng điện) từ ba dây đầu vào động cơ đến bộ vi xử lý. Bộ điều khiển vector tín hiệu điều khiển dựa trên nguyên lý từ thông như hình vẽ. Từ đây, chúng ta có thể tạo ra các mô hình toán học và phương pháp điều khiển cho các loại bộ chuyển đổi này. Trước khi thi công hệ thống truyền động điện biến tần, chúng tôi khẳng định lại cấu trúc dưới đây là xây dựng mô hình điều khiển dựa trên nguyên lý tựa từ trường.
Khi muốn tốc độ lớn hơn tốc độ không tải hoặc tốc độ cài đặt thì chúng ta thay đổi từ thông hoặc dòng điện kích thích nên việc điều khiển động cơ DC rất dễ dàng với các ký hiệu chính. Kết luận: Bắt đầu từ đây, bài toán điều khiển động cơ không đồng bộ trở nên thực sự dễ dàng khi biểu diễn trong hệ tọa độ dq. Hệ thống điều khiển động cơ biến tần trong QC Mô hình điều khiển vectơ động cơ không đồng bộ: Mô hình điều khiển vectơ động cơ không đồng bộ.
Điều đầu tiên cần xử lý là tín hiệu phản hồi đầu vào bộ điều khiển, đó là dòng điện từ các máy biến dòng đặt ở đầu ra của bộ chuyển đổi. Trong phần này chúng tôi mô phỏng một động cơ cảm ứng trên tọa độ từ thông (hoặc hệ quay dq) và điều khiển động cơ này bằng phương pháp điều khiển vectơ. Với đề tài “Nghiên cứu biến tần PV SERIES để điều khiển tốc độ động cơ không đồng bộ ba pha, bơm hybrid và quạt” đã giúp tôi hiểu rõ hơn về lý thuyết và ứng dụng thực tế của đề tài để củng cố thêm đề tài. kiến thức tích lũy được.