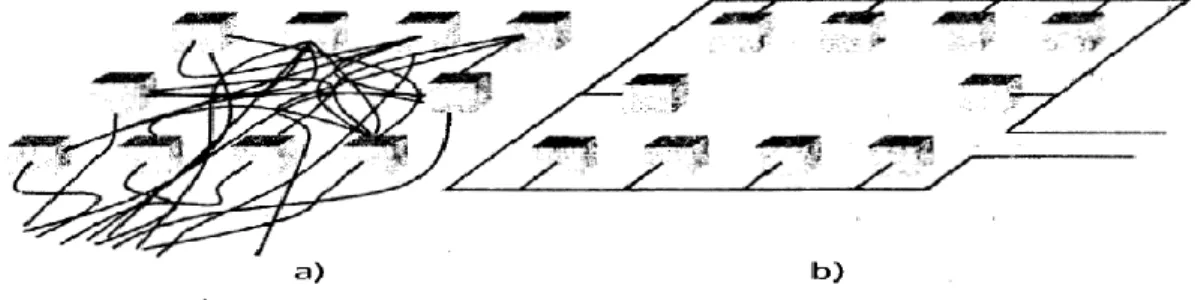
Xây dựng hệ thống điều khiển tự động gồm nhiều bộ điều khiển liên kết với nhau, đồng thời xây dựng mô hình thí nghiệm trực quan hiệu quả phục vụ giáo viên và học sinh của trường trong lĩnh vực truyền thông công nghiệp. Đơn giản hóa cấu trúc kết nối giữa các thiết bị công nghiệp - Giảm đáng kể chi phí đi dây và lắp đặt hệ thống. Bus hệ thống, bus xử lý: Các hệ thống mạng công nghiệp dùng để kết nối các máy tính ở cấp độ điều khiển và giám sát được gọi là bus hệ thống hoặc bus xử lý.
Mạng công ty được đặt trên cùng mô hình cáp hệ thống truyền thông của một công ty sản xuất công nghiệp.
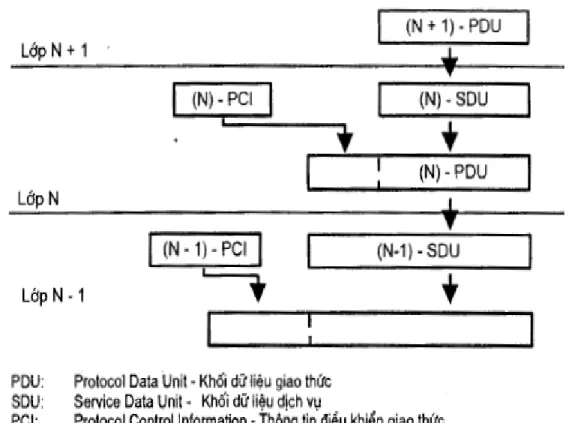
Kiến trúc giao thức 10
Các tác vụ được sắp xếp theo chiều dọc theo các lớp tương ứng với các lớp dịch vụ và lớp giao thức khác nhau. Ngày nay, nó thâm nhập vào nhiều lĩnh vực ứng dụng khác nhau, bao gồm mạng máy tính cục bộ và mạng truyền thông công nghiệp.
Truy nhập Bus 12
Nhược điểm: Hiệu quả trao đổi thông tin giữa các trạm phụ bị giảm do dữ liệu phải đi qua trạm trung gian là trạm chủ, làm giảm hiệu suất truyền dẫn. 2 trạm phụ mất nhiều thời gian trao đổi hơn một chu kỳ bus. Mỗi trạm thay phiên nhau truyền thông tin trong khoảng thời gian cho phép, theo thứ tự định trước. Một tin nhắn ngắn không chứa dữ liệu, có cấu trúc đặc biệt để phân biệt với tin nhắn nguồn và được sử dụng giống như một khóa.
Một trạm chỉ được phép truy cập vào xe buýt và gửi thông tin miễn là nó sở hữu mã thông báo. Một trạm giữ mã thông báo sẽ gửi thông tin đến và được điều khiển bởi một số trạm khác. Trong quá trình cấu hình, các trạm có thể ước tính thời gian sử dụng token của mình và tìm ra các chu kỳ bus phù hợp để có quyền tham gia truyền tải thông tin và điều khiển các hoạt động liên lạc của mạng.
Hạn chế: Phương pháp này bị giới hạn bởi độ dài dây, tốc độ liên lạc và độ dài tin nhắn. Điều kiện để thực hiện phương pháp là tg gửi điện tín lớn hơn 2 lần thời gian truyền của tín hiệu. Mỗi thông báo bắt đầu bằng một chuỗi bit đặc biệt gọi là cờ, theo sau là các bit khác như thông tin điều khiển và địa chỉ.

Bảo toàn dữ liệu 16
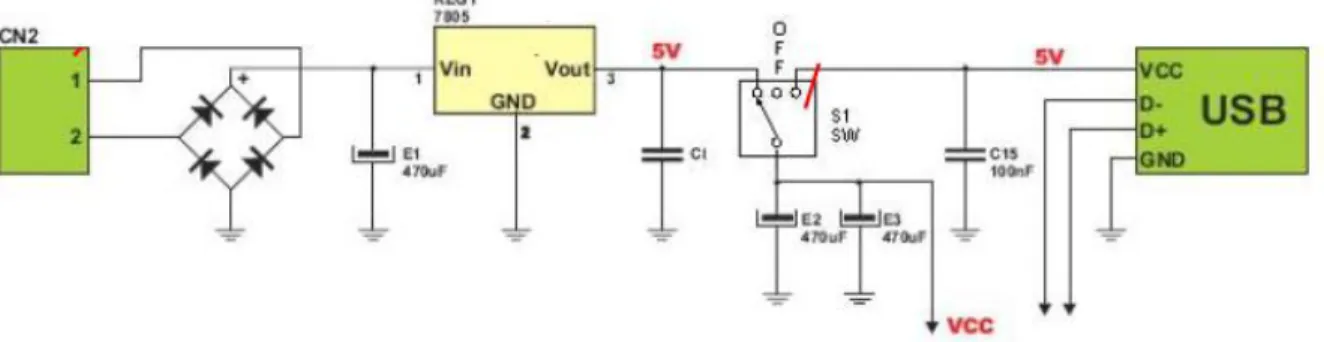
Hệ thống cấp điện bao gồm mạch chỉnh lưu cầu 1 pha tạo ra điện áp một chiều, đi qua tụ lọc rồi đi qua bộ ổn áp IC 7805 để tạo ra điện áp 5V cung cấp điện cho hệ thống mạch điều khiển. Bằng cách điều khiển từng đèn LED phát quang riêng lẻ, chúng ta sẽ có thể rút ra những con số cần hiển thị. Các chân cấp nguồn của mỗi đèn LED 7 đoạn được điều khiển bởi 6 chân của vi điều khiển thông qua các bóng bán dẫn.
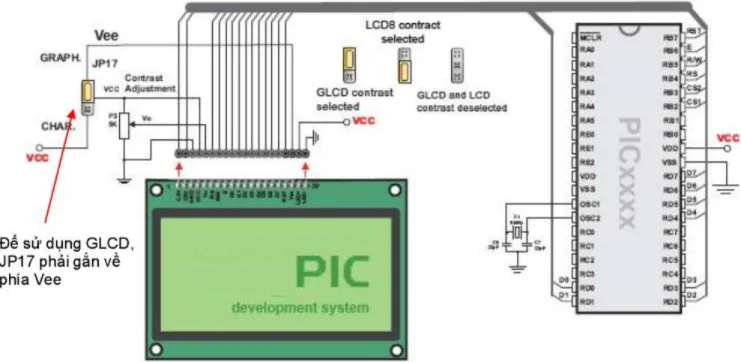
Vì vậy, chúng ta mất đi 14 chân của vi điều khiển để hiển thị hệ thống đèn LED 7 đoạn trên. LCD là mô-đun hiển thị được tích hợp trong bộ điều khiển hiển thị và màn hình LCD. Để điều khiển màn hình LCD, bộ vi điều khiển chỉ cần gửi dữ liệu và các từ điều khiển đến màn hình LCD để thực thi.
Bằng cách đọc các mức logic của các chân đầu vào của vi điều khiển, chúng ta biết liệu mỗi vị trí phím có được nhấn hay không. Vì vậy, cần có bộ chuyển đổi mức điện áp giữa máy tính và vi điều khiển để máy tính và vi điều khiển có thể hiểu được thông tin của nhau. Bộ vi điều khiển PIC16F877 được tích hợp sẵn mô-đun chuyển đổi tương tự sang số (ADC), do đó CPU của vi điều khiển có thể thu thập các giá trị tương tự từ các cảm biến, sau đó phân tích, tính toán để đưa ra các quyết định điều khiển hợp lý.
Dự án đã xây dựng thành công hệ thống thông tin liên lạc kết nối các bộ điều khiển với nhau, từ đó nâng cao năng lực của các bộ điều khiển. Nghiên cứu các chuẩn truyền thông mới hiện đại, từ đó tìm ra các phương thức truyền thông phù hợp để tổng hợp, tích hợp các tính năng truyền thông cho bộ điều khiển. Nghiên cứu ứng dụng các lĩnh vực tự động hóa tiên tiến như vi xử lý, vi điều khiển để xây dựng các bộ điều khiển có khả năng giao tiếp, đặc biệt là công nghệ vi điều khiển PIC của Microchip.
Chủ đề cần phát triển là tạo ra các module giao tiếp tích hợp để kết nối nhanh chóng và đơn giản các bộ điều khiển trong các hệ thống lớn.
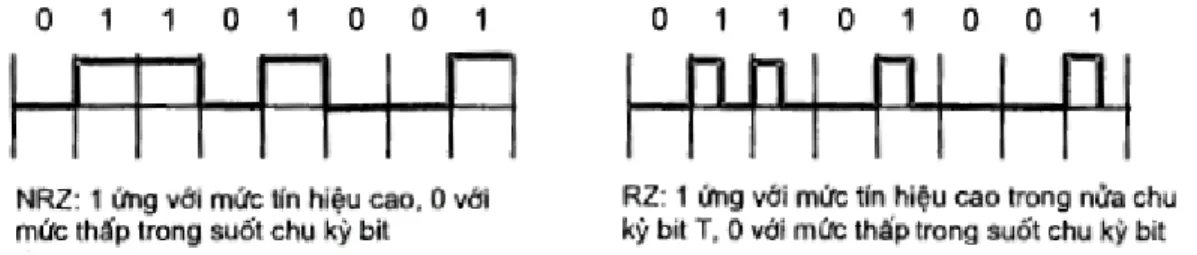
Mã hóa bít 19
Chuẩn truyền dẫn 21
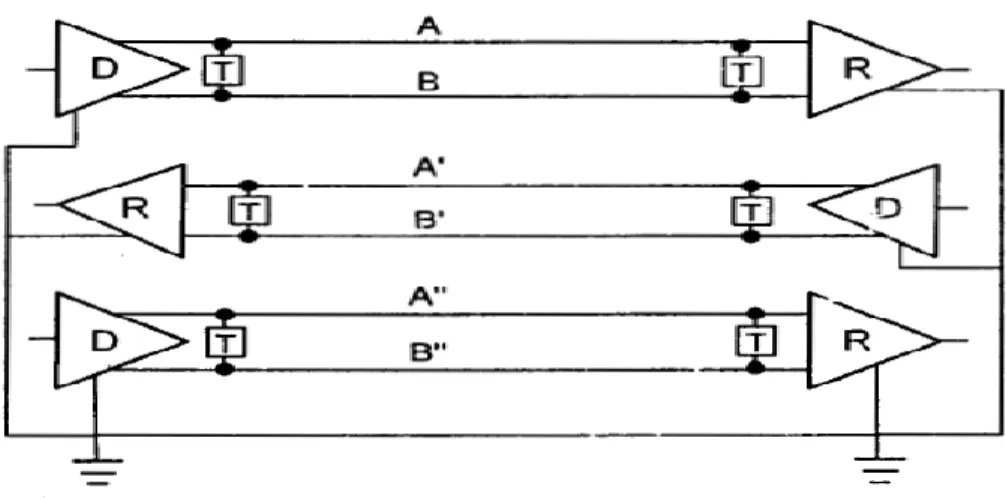
Truyền dữ liệu nối tiếp không đồng bộ là phương pháp chủ yếu được sử dụng trong các mạng truyền thông công nghiệp. Truyền không đối xứng: Sử dụng điện áp của một dây dẫn so với mặt đất để biểu thị trạng thái logic (0, 1) của các tín hiệu khác nhau. Vod: chênh lệch điện áp đầu ra kích thích thông qua điện trở đầu cuối (giữa dây A và B). Vt, Vod không phụ thuộc vào mặt đất, Vod tiêu chuẩn = 1,5 V, máy thu chỉ cần cấp độ.
Hình 1.25: Chênh lệch điện áp đầu ra V OD và chênh lệch điện áp VOS - VGPD Chênh lệch điện áp nối đất.
Môi trường truyền dẫn 25
Giả sử nếu ta kiểm tra và vẽ riêng từng LED 7 đoạn thì số chân mà vi điều khiển cần để điều khiển hệ thống hiển thị trên là 6x8=48 chân, chiếm nhiều chân của vi điều khiển nên người ta sử dụng phương pháp quét LED. Các chân dữ liệu của đèn LED được nối với nhau và được điều khiển bởi 8 chân trên vi điều khiển. Chân đầu vào của vi điều khiển được kéo xuống điện áp 0V thông qua điện trở 10k. Khi không nhấn phím nào, tín hiệu tới vi điều khiển là 0V. Khi nhấn phím, chân vi điều khiển sẽ được nối trực tiếp với điện áp VCC=5V nên tín hiệu đến vi điều khiển sẽ là 5V. Hệ thống đo tín hiệu analog được sử dụng để thu thập tín hiệu analog từ các cảm biến.
Mỗi mô-đun có thể chọn một trong hai chế độ giao tiếp: mạch chủ hoặc mạch phụ. Trong hệ thống lưu ý chỉ có một mạch chính để tránh xung đột dữ liệu. Giá trị x trên mạch chủ sẽ liên lạc tích cực với các mạch phụ khác. Nếu hệ thống hoạt động bình thường, tất cả các mạch trong hệ thống sẽ hiển thị cùng một giá trị x.
Bằng cách thay thế vai trò của các mô-đun khác trong hệ thống, chúng ta sẽ kết luận rằng vai trò của các mạch điện trong hệ thống là như nhau. Cấu trúc mở của hệ thống giúp các nhà nghiên cứu chủ động thực hiện các chức năng chính và phát triển, mở rộng dễ dàng. Hệ thống truyền thông có thể thay đổi số lượng nút truyền và cấu hình truyền thông chỉ bằng những thao tác đơn giản.
Mô hình thử nghiệm là một hệ thống mở giúp các nhà nghiên cứu chủ động thử nghiệm và dễ dàng tạo ra, triển khai các tính năng mới. 2. Các mô hình của dự án cần được quảng bá rộng rãi làm cơ sở cho việc liên kết đào tạo. Xây dựng hệ thống phòng thí nghiệm với các trường cao đẳng, đại học khác.
Thiết bị lien kết mạng 25
Xây dựng phần cứng hệ thống 26
Với bộ chuyển đổi điện áp chúng ta có thể xây dựng một mạch điện hoặc có thể sử dụng IC có tích hợp bộ chuyển đổi điện áp đó là IC MAX232. Tất cả các mạch đều có sự lựa chọn là mạch chủ hoặc mạch phụ bằng cách cài đặt các nút trên bảng mạch. Để kiểm tra kết nối giao tiếp giữa các mạch, trên bo mạch chủ chúng ta thiết lập và thay đổi giá trị của các biến giao tiếp bằng các nút, giá trị này ngay lập tức được hiển thị trên bo mạch chủ và cũng được hiển thị. Mạch chủ truyền thông tin này đến các mạch phụ.
Các mạch Slave sẽ hiển thị thông tin nhận được, tức là nếu giao tiếp đúng thì giá trị hiển thị trên mạch Slave sẽ giống với giá trị hiển thị trên mạch Master. Cài đặt ít nhất 3 mô-đun giao tiếp trên PCB để thử nghiệm giao tiếp đa kênh. Ban đầu, khi bật nguồn, các mô-đun mặc định đều là các mạch phụ. Muốn module chuyển sang mạch master ta nhấn phím 1, muốn chuyển sang mạch phụ ta nhấn phím 2.