ĐỘNG CƠ ĐIỆN MỘT CHIỀU VÀ CÁC PHƢƠNG
MÁY ĐIỆN MỘT CHIỀU
- Khái niệm
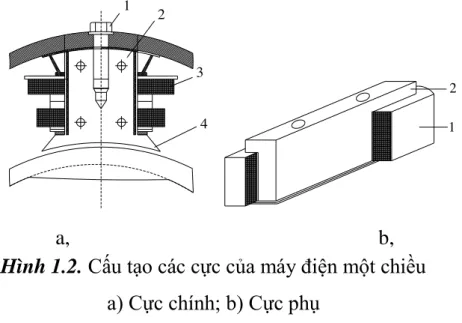
- Cấu tạo của máy điện một chiều
- Các trị số định mức
Giống như các loại máy điện khác, nó cũng bao gồm bộ phận đứng yên (stato) và bộ phận quay (rôto). Về chức năng, máy điện một chiều còn được chia thành cảm ứng (kích thích) và phần ứng (chuyển hóa năng lượng). Khác với máy đồng bộ, trong máy điện một chiều, phần cảm ứng luôn ở phần tĩnh và phần ứng nằm ở rôto.
Stator của máy DC là bộ phận cảm biến. nơi tạo ra từ thông chính của máy. Cấu tạo các cực của máy điện một chiều a) Cực chính; b) Cột phụ... thay đổi, lõi thép cột phụ cũng được lắp các tấm thép, cuộn 3 đặt trên lõi thép 2. Trong các máy điện cỡ vừa và nhỏ, tấm thép dày thường được uốn cong và hàn lại, trong các máy điện lớn thường sử dụng thép đúc.
Trong các máy điện vừa và lớn, dây dẫn có tiết diện hình chữ nhật thường được sử dụng. Chế độ làm việc định mức của máy điện một chiều là chế độ làm việc trong điều kiện do xưởng sản xuất quy định.
ĐẶC TÍNH CƠ ĐỘNG CƠ ĐIỆN MỘT CHIỀU
- Nguyên lý làm việc của động cơ điện một chiều
- Đặc tính cơ của động cơ điện một chiều
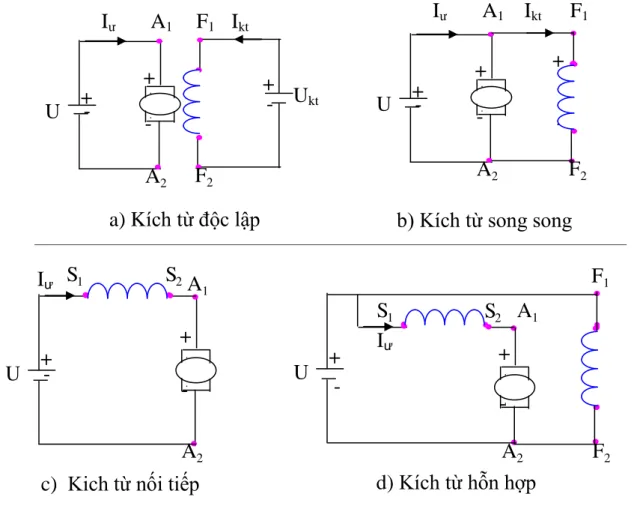
Với động cơ DC kích thích độc lập (Hình 1.5a), dòng điện phần ứng và dòng điện kích từ có thể được điều khiển độc lập với nhau. Như vậy theo (1.5), đặc tính cơ của động cơ một chiều kích thích độc lập là đường thẳng như vẽ trên hình 1.6. Tốc độ không tải của động cơ được xác định bởi điện áp nguồn U và từ thông K.
Với động cơ DC kích thích nối tiếp, từ thông là hàm số của dòng điện phần ứng. Đặc tính cơ của động cơ DC kích từ nối tiếp được thể hiện trên hình 1.6. Theo công thức (1.10), tốc độ của động cơ kích thích nối tiếp tỉ lệ nghịch với căn bậc hai của mô men xoắn.
Đặc tính của động cơ DC có kích thích hỗn hợp được thể hiện trên hình 1.6. Tốc độ không tải của động cơ phụ thuộc vào dòng điện từ hóa qua cuộn dây song song và nối tiếp.
CÁC PHƢƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ MỘT CHIỀU
- Khái niệm chung
- Sơ lƣợc các phƣơng pháp điều chỉnh tốc độ động cơ một chiều DC
Điều chỉnh điện áp cấp cho phần ứng động cơ + Điều chỉnh điện áp cấp cho mạch kích thích động cơ. Đặc tính cơ tĩnh của động cơ được kích thích độc lập và mắc nối tiếp khi điều chỉnh điện áp cấp cho phần ứng động cơ được trình bày trên Hình 1.8 a và Hình 1.8 b. Đặc điểm quan trọng của phương pháp này là độ cứng đặc tính cơ học không thay đổi khi điều chỉnh tốc độ động cơ.
Điện áp phần ứng của động cơ có thể được điều chỉnh bằng: - máy phát điện của động cơ DC (hệ thống máy phát điện - động cơ. Điều chỉnh từ thông được sử dụng khi cần tăng tốc độ hoạt động của động cơ lên tốc độ định mức cao hơn. Đặc tính tĩnh của động cơ kích từ độc lập và kích từ tuần tự khi điều chỉnh từ thông được thể hiện trên hình 1.8 a và 1.8 b bằng nét đứt.
Một số động cơ được thiết kế đặc biệt cho phép tốc độ tối đa đạt gấp 6 lần tốc độ định mức. Đối với động cơ DC kích từ độc lập và song song, công suất cực đại cho phép của động cơ gần như không đổi ở mọi tốc độ khi điều chỉnh từ thông (xem Hình 1.9). Điều này có thể thấy được nếu giả sử rằng dòng điện tối đa cho phép, I, của động cơ không thay đổi khi điều chỉnh từ thông và điện áp nguồn.
Đặc tính cơ học khi kiểm tra điện áp phần ứng của động cơ DC. Với động cơ công suất nhỏ, một biến trở cũng có thể mắc nối tiếp với mạch kích từ để điều chỉnh từ thông. Với động cơ DC kích thích nối tiếp, việc điều chỉnh từ thông được thực hiện bằng cách thay đổi điện trở song song với cuộn dây kích từ.
Đặc tính cơ và điện của động cơ một chiều kích từ độc lập khi điều chỉnh để giảm từ thông. Sau khi tổng hợp các bộ điều chỉnh, ta có sơ đồ cấu trúc của hệ thống điều khiển tốc độ động cơ DC như hình 1.29. TÍNH TOÁN CÁC THAM SỐ CỦA HỆ THỐNG ĐIỀU CHỈNH TỐC ĐỘ CỦA ĐỘNG CƠ MỘT CHIỀU KÍCH THÍCH ĐỘC LẬP.
Tốc độ thực tế của động cơ thông qua cảm biến tốc độ (encoding) cũng được đưa vào bộ điều khiển và hiển thị trên hệ thống hiển thị. Hệ thống hiển thị sẽ hiển thị giá trị cài đặt và giá trị tốc độ động cơ đạt được là như nhau.
HỆ TRUYỀN ĐỘNG ĐIỆN T-Đ VÀ CÁC PHƢƠNG PHÁP TỔNG HỢP
- Hệ truyền động điện T-Đ
- Cấu trúc cơ bản của hệ thống truyền động điện điều chỉnh động cơ điện
- Tính chất động của mạch điều chỉnh động cơ điện một chiều
- Phƣơng pháp tổng hợp mạch vòng trong hệ truyền động T-Đ
MÔ PHỎNG HỆ TRUYỀN ĐỘNG T-Đ TRÊN
ĐẶT VẤN ĐỀ
Mô phỏng là một phương pháp hiện đại được nghiên cứu rộng rãi hiện nay. Mô phỏng đã giúp chúng tôi rút ngắn quá trình từ nghiên cứu lý thuyết đến mô hình thực nghiệm. Với mục đích đó, trước khi xây dựng mô hình hệ thống truyền động điện một chiều với bộ chuyển đổi điều khiển bằng vi điều khiển, tác giả đã mô phỏng hệ thống truyền động điện này trên nền tảng Matlab.
TÍNH TOÁN CÁC THÔNG SỐ HỆ ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ
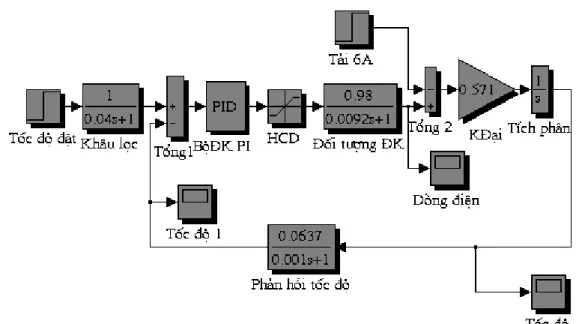
TÍNH TOÁN CÁC THAM SỐ HỆ THỐNG ĐIỀU CHỈNH TỐC ĐỘ CỦA ĐỘNG CƠ DC KÍCH HOẠT ĐỘC LẬP. N: Số dây dẫn cuộn dây phần ứng tác dụng: Từ thông kích thích dưới một cực từ. Dựa vào tính toán và phân tích ở trên ta có được sơ đồ khối sử dụng MATLAB như hình 2.2.
Đặc tính vận tốc tương ứng với tín hiệu đầu vào là định mức, tín hiệu nhiễu là xung. Đặc tính tốc độ tương ứng với tín hiệu đầu vào là danh nghĩa, tín hiệu nhiễu là hình sin. Đặc tính vận tốc tương ứng với tín hiệu đầu vào đang được đánh giá, tín hiệu nhiễu là ngẫu nhiên.
Đặc tính tốc độ tương ứng với tín hiệu đầu vào là danh nghĩa và tín hiệu nhiễu không đổi.
NHẬN XÉT
XÂY DỰNG MÔ HÌNH HỆ THỐNG ĐIỀU KHIỂN
- SƠ ĐỒ KHỐI BỘ ĐIỀU CHỈNH PID ĐỘNG CƠ MÔT CHIỀU BẰNG
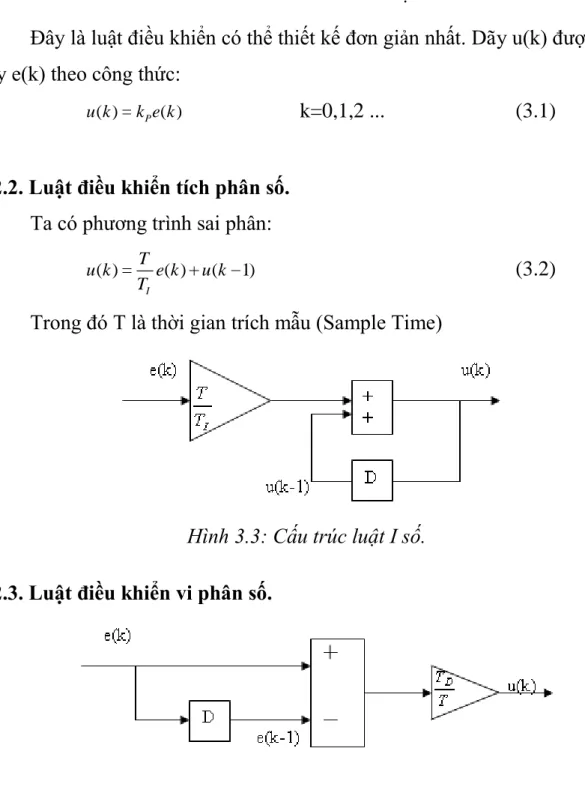
- CÁC LUẬT ĐIỀU KHIỂN SỐ
- Luật điều khiển tỷ lệ số
- Luật điều khiển tích phân số
- Luật điều khiển vi phân số
- Luật điều khiển PID số
- XÂY DỰNG BỘ VI XỬ LÝ DÙNG CHIP 16F87XA
- Giới thiệu chip 16F87XA dùng trong mạch điều khiển
- Xây dựng bộ PID dùng chip PIC 16F87XA
- XÂY DỰNG MÔ HÌNH HỆ THỐNG TRUYỀN ĐỘNG ĐIỆN ĐIỀU
- Sơ đồ IC điều khiển PIC 16887
- Mạch công suất cấp cho động cơ
- Mạch nguyên lý khối nguồn và các Led hiển thị
- Lƣu đồ thuật toán chƣơng trình chính
Ví dụ: thời gian xử lý lệnh có thể nhanh để tăng hiệu suất thời gian thực của bộ điều khiển. Luật điều khiển PID số trong công thức trên được chọn để cài đặt cho bộ điều khiển chế tạo trên chip PIC. PIC sử dụng mã nguồn đơn giản nằm trong ROM và mặc dù ngày nay thuật ngữ RISC không được sử dụng nhưng PIC thực sự là một bộ vi điều khiển có kiến trúc RISC thực thi một lệnh trên mỗi lệnh. chu kỳ máy (4 chu kỳ) của bộ dao động.
Giá trị cài đặt Wđ được người dùng nhập thông qua hệ thống bàn phím, giá trị cài đặt hiển thị trên hệ thống hiển thị. Bộ điều khiển c sẽ tính toán độ chênh lệch giữa giá trị cài đặt và giá trị đạt được rồi tính toán đầu ra bộ điều khiển theo định luật PID để xuất tín hiệu điều khiển của đối tượng thông qua mạch động. Hệ thống có thuật toán điều khiển PID kỹ thuật số sẽ luôn cố gắng đưa sai số về 0, nghĩa là giá trị đạt được sau 1 lần sẽ bằng giá trị đã đặt.