Băng tải (còn gọi là băng tải) là thiết bị vận chuyển liên tục, có phạm vi vận chuyển lớn. Hệ số giãn dài thấp tốt hơn lõi nylon và các loại vải băng tải khác, được áp dụng trên đường truyền vật liệu dài.

CÁC LĨNH VỰC SẢN XUẤT ỨNG DỤNG THIẾT BỊ VÂN TẢI LIÊN TỤC
Hệ thống băng tải trong các dây chuyền sản xuất của nhà máy: Giầy, thuốc, nƣớc uống có ga
Sau khi sấy khô, giày được băng chuyền đưa đến khu vực bảo quản thành phẩm để tiếp tục các công đoạn tiếp theo của quy trình sản xuất. Hệ thống băng tải trong dây chuyền sản xuất của nhà máy xi măng Việc xây dựng loại băng tải này không chỉ cho phép giảm chi phí đầu vào.
Hệ thống băng tải trong dây chuyền sản xuất của nhà máy xi măng Viêc xây dựng băng tải này không chỉ cho phép giảm chi phí đầu vào cho
Thông qua hệ thống băng tải bùn được vận chuyển về phễu chứa bùn 21BN2. Vật liệu đốt được vận chuyển bằng tàu biển từ nơi khác đến và đưa vào băng tải từ gầu 21SL31.
Hệ thống băng tải trong công nghiệp hàng không
Than được đưa bằng băng tải và đổ vào kho bằng xe xếp 21SIC31 công suất 150 tấn/h cũng như đá với than được đổ thành 2 đống dọc theo chiều dài kho. Sau khi than được xếp thành đống, Máy thu hồi làm việc vận chuyển than trên băng tải trong Phễu và cung cấp cho Nhà máy làm mát.
CÁC YÊU CẦU VỀ ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN CHO BĂNG TẢI
Các yêu cầu chung
Hệ thống có thể được điều khiển thủ công hoặc tự động, tùy thuộc vào quy mô đầu tư.
Yêu cầu về điều khiển
SƠ LƢỢC MỘT SỐ PHẦN TỬ TRONG MÔ HÌNH BĂNG TẢI 1. Hình ảnh tổng quan của băng tải
Nhiêm vụ của mô hình
Với mô hình được thiết kế với các kích thước trên, mục đích, nhiệm vụ của mô hình là thể hiện chức năng chính là vận chuyển, phân loại một số sản phẩm nhỏ gọn, nhẹ theo màu sắc và mô phỏng một Mô hình Công nghệ ứng dụng trong các ngành công nghiệp, chế biến thực phẩm, v.v.
GIỚI THIỆU VỀ VI ĐIỀU KHIỂN ATMEGA8 1. TỔNG QUAN VỀ VI ĐIỀU KHIỂN ATMEGA8
CẤU TRÚC CHUNG AVR
- Cấu trúc tổng quát
- Thanh ghi trạng thái
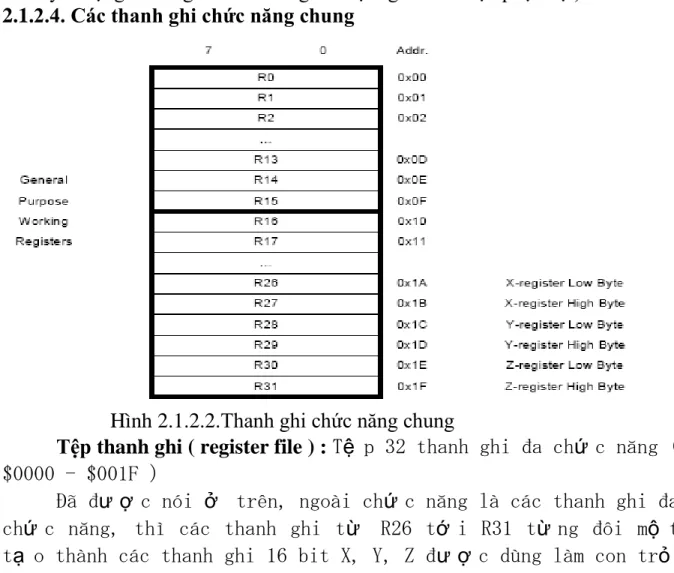
- Các thanh ghi chức năng chung
Trình biên dịch C thường sử dụng các thanh ghi con trỏ này để quản lý ngăn xếp dữ liệu của chương trình C. Nó là thanh ghi 16 bit, nhưng cũng có thể được coi là hai thanh ghi chức năng đặc biệt. 8 bit. Khi chương trình dịch vụ hoặc chương trình con bị gián đoạn, con trỏ PC được lưu trên ngăn xếp trong khi con trỏ ngăn xếp bị giảm đi hai vị trí.
Ngược lại, việc thực thi lệnh POP sẽ tăng con trỏ ngăn xếp lên 1 và thực thi lệnh RET hoặc RETI sẽ tăng con trỏ ngăn xếp lên 2. Do đó, chương trình phải đặt con trỏ ngăn xếp trước giá trị ngăn xếp ban đầu. trước khi chương trình con được gọi hoặc các ngắt được kích hoạt.
CẤU TRÚC NGẮT CỦA ATMEGA8 1. Khái niệm về ngắt
- Trình phục vụ ngắt và bảng vector ngắt
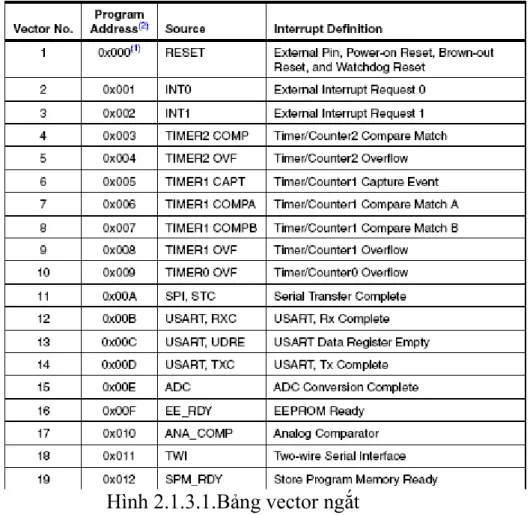
- Bảng vector ngắt
- Thứ tự ƣu tiên ngắt
- Ngắt trong ngắt
Với bộ vi điều khiển AVR, thứ tự ưu tiên của các ngắt không thể thay đổi và tuân theo quy tắc: "Một vectơ ngắt có địa chỉ thấp hơn trong bộ nhớ chương trình sẽ có mức ưu tiên cao hơn. . Khi xảy ra ngắt và được phục vụ, bit I của thanh ghi SREG sẽ bị xóa .
CẤU TRÚC BỘ NHỚ
- Bộ nhớ chƣơng trình (Bộ nhớ Flash)
1120 ô nhớ dữ liệu ghi địa chỉ các tệp thanh ghi, bộ nhớ I/O và bộ nhớ dữ liệu SRAM bên trong. 96 ô nhớ đầu tiên xử lý tệp thanh ghi và bộ nhớ I/O, 1024 ô nhớ tiếp theo xử lý bộ nhớ SRAM bên trong. Atmega8 chứa 512 byte bộ nhớ dữ liệu EEPROM và được sắp xếp từng byte, cho phép thực hiện các thao tác đọc/ghi từng byte.
Đây là bộ nhớ dữ liệu có thể được ghi và xóa trong khi bộ vi điều khiển đang hoạt động và không bị mất dữ liệu nếu nguồn điện bị gián đoạn.
CÁC CỔNG VÀO RA (I/O)
- Các chức năng của Port B
- Các chức năng của Port C
- Các chức năng của Port D
Chúng ta có các thanh ghi và địa chỉ cổng cho mỗi cổng đó là: Thanh ghi dữ liệu cổng (PortB, PortC, PortD), Thanh ghi dữ liệu điều khiển cổng (DDRB, DDRC, DDRD) và cuối cùng nó cho biết mã pin của đầu vào cổng (PINB, PINC, PIND ). Khi SPI được bật làm Master, dữ liệu trực tiếp của chân này được điều khiển bởi DDB3. Dữ liệu đầu ra để kiểm tra thanh ghi DDRxn để đặt PORTx (hoặc bit n trong cổng) làm đầu vào (xóa thanh ghi DDRx hoặc bit).
Cuối cùng, đọc dữ liệu từ địa chỉ PINxn (trong đó x: là cổng và n là bit). Để gửi dữ liệu từ bộ vi điều khiển đến các cổng, các bước thực hiện hoàn toàn giống nhau.

BỘ ĐỊNH THỜI 8BIT TIMER/COUNTER 0
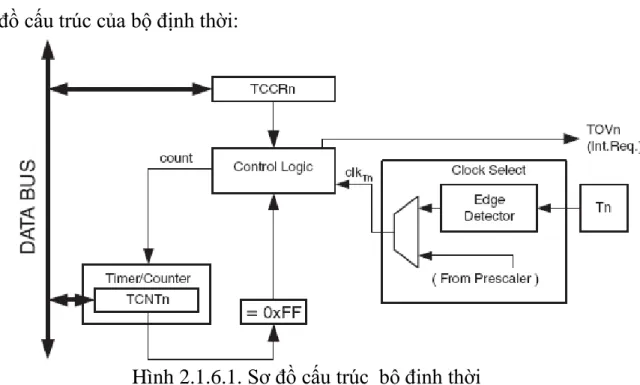
- Hoạt động của bộ Timer/Couter
- Đơn vị đếm
- Một số định nghĩa
Đầu ra của khối chọn đồng hồ được coi là đồng hồ hẹn giờ (clkT0). Thanh ghi OCR0 luôn được so sánh với giá trị bộ đếm thời gian/bộ đếm. Bộ so sánh 8 bit liên tục so sánh giá trị TCNT0 với giá trị trong thanh ghi so sánh đầu ra (OCR0).
Khi giá trị TCNT0 bằng OCR0, bộ so sánh sẽ tạo ra tín hiệu. Tín hiệu này sẽ đặt cờ so sánh đầu ra (OCF0) thành 1 trong chu kỳ xung nhịp tiếp theo.
TOP Bộ đếm đạt TOP khi nó bằng giá trị tối đa của phạm vi đếm. Có một thanh ghi điều khiển SPCR (thanh ghi điều khiển SPI), thanh ghi trạng thái SPSR (thanh ghi trạng thái SPI) và cuối cùng là thanh ghi dữ liệu SPDR (thanh ghi dữ liệu SPI).
TWI – TWO WIRE INTERFACE
BỘ SO SÁNH TƢƠNG TỰ (ALALOG COMPARATOR)
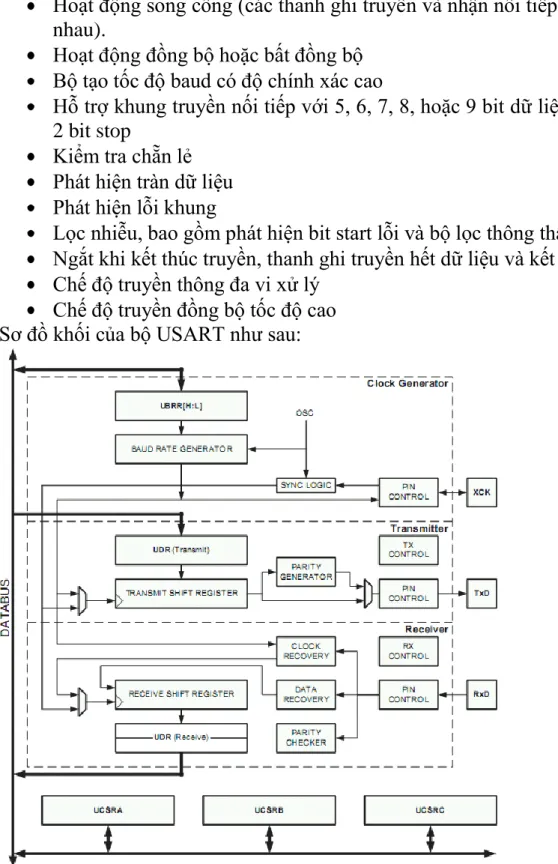
- Tạo xung clock
- Định dạng khung truyền
Chúng ta có thể sử dụng lệnh SBI hoặc CBIU để thay đổi trạng thái các bit của thanh ghi này ngoại trừ bit ACI. Hoạt động đồng bộ hoặc không đồng bộ Bộ tạo tốc độ truyền có độ chính xác cao. Bộ tạo xung nhịp tạo ra xung nhịp cơ bản cho máy phát và máy thu.
USART hỗ trợ bốn chế độ hoạt động của đồng hồ: không đồng bộ, không đồng bộ tốc độ cao, truyền đồng bộ chính và truyền đồng bộ phụ. Về cài đặt hệ thống đồng hồ, người ta còn sử dụng bit cầu chì CKOPT, vai trò của nó khá linh hoạt tùy theo cài đặt đồng hồ cho hệ thống.
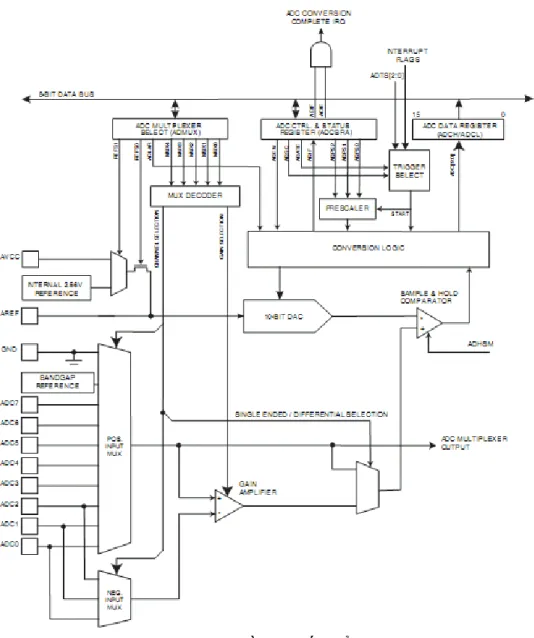
BỘ BIẾN ĐỔI A/D( ANALOG/DIGITAL)
ADC có nhiệm vụ chuyển đổi tín hiệu điện áp analog thành tín hiệu số có độ phân giải 10 bit, với giá trị điện áp tối thiểu được đặt ở chân AGND và giá trị tối đa của điện áp analog nối vào chân AREF. Quá trình chuyển đổi được bắt đầu bằng cách ghi logic 1 vào bit ADSC và trong suốt quá trình chuyển đổi, bit này được giữ ở mức cao. Khi quá trình chuyển đổi hoàn tất, bit này sẽ bị xóa bằng phần cứng và cờ AIDF được đặt.
Dữ liệu sau khi chuyển đổi được gửi đến thanh ghi dữ liệu ADCL và ADCH, nhưng lưu ý khi đọc dữ liệu từ 2 thanh ghi này thì đọc ADCL trước rồi mới đến ADCH. Bước 3: Thiết lập thông số tốc độ chuyển đổi ADC thông qua xung chuyển đổi.
CÁC LINH KIỆN KHÁC 1. Motor một chiều
Biến áp cấp nguồn
Cảm biến quang
Để cấp nguồn cho mạch điện và mạch điều khiển trong mô hình, tôi sử dụng máy biến áp hạ thế. Gồm 3 dây: 2 dây nguồn và 1 dây phản hồi tín hiệu mức logic về vi điều khiển. Được sử dụng để phát hiện khi một sản phẩm đi ngang qua và gửi tín hiệu điện đến bộ vi điều khiển, sau đó bộ vi điều khiển sẽ thực hiện chức năng được lập trình.
Công tắc hành trình Bốn công tắc hành trình
Nó dùng để tạo góc quay cho cần cố định trên động cơ DC 12V. Khung sắt có kích thước: dài 1,7m, rộng 60cm, cao 50cm Băng tải chống trượt: mặt sau có lớp vải chống trượt. Trục băng tải: Trong mô hình tôi sử dụng 6 thanh nhựa đặc có đường kính 20 mm, mỗi thanh dài 18 cm.
THIẾT KẾ MẠCH ĐIỆN
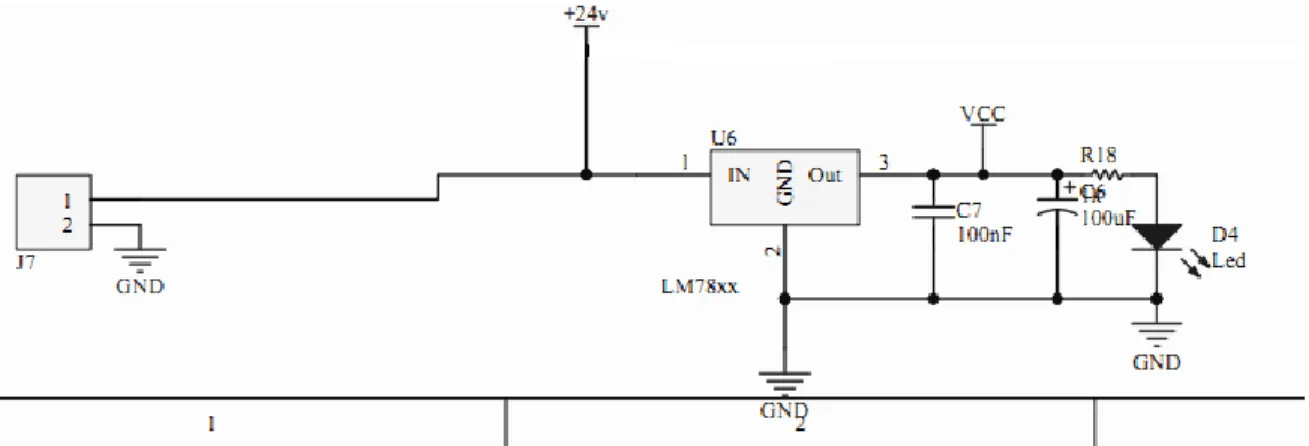
- Mạch nguồn 5V DC và 12V DC Chức năng bộ nguồn
- Khối mạch điều khiển ATmega8 Sơ đồ nguyên lý
- Mạch in
- Mạch điều khiển cho cảm biến màu sắc
Bộ nguồn phải có tính chống nhiễu tốt ( Nhất là các xung nhiễu từ động cơ ) để tránh làm treo vi điều khiển. Sử dụng các cổng kết nối J1, J2, J3.Trong đó J1để nạp chương trình điều khiển cho ATmega8, J2 để kết nối với mạch cảm biến quang. Chân PB1, PB2, PB3 để tạo tín hiệu cho photo quang Chân PD0, PD1 để tạo tín hiệu điều khiển cho cặp role Chân PD5, PD6, PD7 để nhận tín hiệu từ cảm biến quang Các chân GND nối mass.
Photocell có tác dụng cách ly tín hiệu điều khiển và phần nguồn, một cặp rơ le có tác dụng quay mô tơ gạt nước của sản phẩm. Tụ điện C1 và C2 lọc nhiễu từ nguồn vào cũng như nguồn ra của mạch.
LƢU ĐỒ THUẬT TOÁN ĐIỀU KHIỂN
CHƢƠNG TRÌNH ĐIỀU KHIỂN
Input recording on falling edge // Timer 1 Overflow Interrupt: Off // Input Record Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0xA1;.
MÔ PHỎNG
Tìm hiểu một số ứng dụng của thiết bị vận tải trong công nghiệp. Thiết kế sơ đồ các thuật toán điều khiển, mạch điều khiển và thiết kế tổng thể các mô hình vận tải phân loại sản phẩm theo màu sắc. Kiểm soát khoảng cách sản phẩm chưa được triển khai Kiểm soát số lượng sản phẩm chưa được triển khai.
Để môn học được đầy đủ và chi tiết hơn về cả phần cứng và điều khiển, tôi mong rằng Bộ môn Điện Công nghiệp sẽ tạo điều kiện để các sinh viên tương lai hoàn thiện hơn nữa môn học để có thể đưa vào thực tiễn đóng góp cho tương lai. ngành công nghiệp trong nước. Tài liệu từ Internet, từ diễn đàn www.hocavr.com và các dự án của học sinh lớp trên.