Nghiên cứu phối hợp công suất tối ưu, thu thập dữ liệu thực nghiệm và mô phỏng. Thông tin về kết quả nghiên cứu thuộc đề tài Khoa học và Công nghệ tại Trường Đại học Đà Nẵng cấp ĐẠI HỌC ĐÀ NẴNG. Tên dự án: NGHIÊN CỨU XÂY DỰNG PHƯƠNG TIỆN XÁC ĐỊNH CÔNG SUẤT TỐI ƯU ĐẠI ĐẠO TỔNG HỢP TRÊN XE HYBRID.
Nghiên cứu chung về pin và ắc quy để lưu trữ và chuyển đổi năng lượng trên ô tô.
Hình ảnh, sơ đồ minh họa chính
Tuy nhiên, đây mới chỉ là nghiên cứu ban đầu và cần có những nghiên cứu thực nghiệm sâu hơn với dòng xe du lịch của công ty để nó trở nên hữu ích. Phối hợp với các cơ sở sản xuất trong quá trình phát triển sản phẩm và tiếp tục điều tra, cải tiến các vấn đề còn tồn tại.
General information
Objective(s)
Creativeness and innovativeness
Research results
12 - Development of stable controls of electric power conversion controls in HEVs to coordinate compensating power for gasoline engines.
Products
Effects, transfer alternatives of research results and applicability
14 - All people are entitled to use a car that is clean energy and environmentally friendly. Elevating science higher in the country to be on par with developed countries is now beyond us. Truong Hai has agreed to cooperate with UD in the research and development of hybrid products.
Phối hợp với các cơ sở sản xuất trong quá trình phát triển sản phẩm và tiếp tục nghiên cứu để nâng cao khả năng sống sót. Giao thông vận tải nói riêng là vấn đề về cơ sở hạ tầng và phát triển không ngừng. Hiện nay, xe máy, xe máy, ô tô là phương tiện di chuyển chủ yếu ở Việt Nam cả về số lượng và khối lượng hàng hóa vận chuyển trên toàn quốc, đặc biệt là tại các khu vực thành thị, khu vực phát triển kinh tế, nơi mà xe máy, xe máy chiếm vị trí quan trọng nhất.
Từ những nền tảng đó, việc thực hiện đề tài nghiên cứu này là một hướng đi đúng đắn và sẽ đóng góp một số kiến thức khoa học công nghệ cần thiết trong việc cải thiện môi trường sống của chúng ta như đã đề cập ở trên. TỔNG QUAN VỀ ĐỀ TÀI NGHIÊN CỨU 1.1 Lựa chọn vấn đề nghiên cứu của dự án.
TỔNG QUAN ĐỀ TÀI NGHIÊN CỨU 1.1 Lựa chọn vấn đề nghiên cứu của đề tài
- Mục tiêu tổng quát
- Mục tiêu cụ thể
- Những yêu cầu đưa ra cho vấn đề nghiên cứu
- Tính mới trong đề tài nghiên cứu
Nghiên cứu đặc điểm của các thiết bị sạc nhanh và quá trình chuyển đổi trung gian từ sạc nhanh sang sạc chậm. Nghiên cứu xây dựng hàm hệ thống tối ưu có xét đến các yếu tố phi tuyến và nhiễu. Nghiên cứu động lực học chi tiết của hệ thống truyền động cơ điện trên ô tô.
Nghiên cứu vấn đề đo tín hiệu phối hợp điều khiển tỷ số công suất RPS giữa hai động cơ. Nghiên cứu xây dựng thuật toán điều chế tỷ lệ RPS tối ưu, đây là phần quan trọng nhất của đề tài này. Cung cấp mô hình động hoàn chỉnh của cơ sở PSH làm cơ sở cho quá trình xây dựng mô hình mô phỏng.
Nghiên cứu phát triển thuật toán tối ưu điều khiển tỷ số RPS nhằm nâng cao chất lượng điều khiển quá trình chuyển động của xe PSH. Nghiên cứu mô hình bài toán hàm mục tiêu nhằm tối ưu hóa quá trình điều khiển nhằm giảm thiểu tiêu hao nhiên liệu. Nghiên cứu phát triển thiết bị sạc nhanh kết hợp với ắc quy trong PSH để tận dụng năng lượng nhất thời.
NGHIÊN CỨU ĐẶC TÍNH ĐỘNG CƠ NHIÊN LIỆU 2.1.1 Đặc tính công suất
Đặc tính mômen
Ở ô tô nói chung, mômen xoắn được gọi là mô men xoắn, là đại lượng đặc trưng cho lực kéo của ô tô. Trong đó kT là hệ số đặc trưng cho giá trị hiệu dụng của công suất động cơ.
Đặc tính cơ
Trong đó M là tổng khối lượng của xe, V là tốc độ dài hạn của xe, F là lực kéo do tổng công suất của động cơ tạo ra, thành phần lực Fri là lực cản, bao gồm: lực cản 4 bánh, chuyển động của xe lực cản, lực cản của nhánh.
- Ảnh hưởng biến đổi công suất
- Ảnh hưởng tiêu hao nhiên liệu
Tìm cách giảm bớt sức mạnh tích lũy cần thiết. Nếu nhìn vào biểu thức (), bạn có thể thấy rằng lực quán tính và lực hấp dẫn có thể dương hoặc âm. Nếu lực âm thì cần phải có thiết bị để tích trữ năng lượng, sau đó giải phóng khi cần lực dương hơn. Trong đó PP là công suất đầu ra sơ cấp được tạo ra do quá trình đốt cháy nhiên liệu, Pm là công suất của hệ thống hybrid bao gồm máy phát điện và động cơ điện tuần hoàn, và Pk là công suất phanh.
Nhìn vào biểu đồ, chúng ta thấy mức tiêu hao nhiên liệu của động cơ là tối ưu trong một diện tích rất nhỏ, nằm giữa dải tốc độ làm việc, tương ứng với mô men xoắn cực đại. Hệ số này đánh giá hiệu suất của công suất điện so với công suất cơ. Trong đó PP là khả năng kéo và PS là khả năng lưu trữ.
Hơn nữa, chúng ta bỏ qua trường hợp ô tô chạy theo quán tính của chính nó và không có vận tốc ban đầu, sao cho P bằng 0. Vì PP là công suất do động cơ đốt trong sơ cấp tạo ra nên các hệ số có thể dương hoặc âm.
TÍNH ĐỘNG CƠ ĐIỆN MỘT CHIỀU VÀ CÁC BỘ ĐIỀU KHIỂN, BỘ BIẾN ĐỔI
Đặc tính động cơ điện một chiều
- Đặc tính tĩnh và đặc tính trạng thái
Các bộ biến đổi một chiều
- Bộ điều áp
- Bộ điều áp thuận nghịch
- Bộ điều khiển dùng vi điều khiển Về phần cứng, bộ điều khiển bao gồm các khối
Bộ chuyển đổi DC được sử dụng để thay đổi các thông số nguồn cho các thiết bị chạy bằng nguồn DC. Về lý thuyết, bộ điều áp có thể hoạt động liên tục hoặc không liên tục. Về cơ bản có 2 bộ điều chỉnh áp suất được mắc song song để thực hiện chức năng Generator – Motor trên bo mạch chủ.
Trong đó luồng IM tương ứng với việc mở van T1 và T3 để hoạt động ở chế độ động cơ. Khối đầu vào kỹ thuật số: Được sử dụng để thu thập dữ liệu từ cảm biến trạng thái và các thiết bị kỹ thuật số khác. Khối phối hợp đầu vào: dùng để đệm dữ liệu và cách ly dữ liệu khỏi bộ vi điều khiển nếu cần thiết.
Khối tiếp nối đầu ra: dùng để đệm đầu ra và cách ly mạch điều khiển và mạch nguồn. Khối cấp nguồn: cấp nguồn cho các vị trí cấp nguồn khác nhau tương ứng trên bảng mạch. Việc sử dụng các lệnh trong tập lệnh ARM sẽ được thực hiện trong thuật toán điều khiển.
Nguồn sạc một chiều
- Ắc qui và pin Lithium-ion
- Nguồn sạc nhanh dùng tụ hóa dung lượng lớn .1 Đặc điểm
- Siêu tụ điện (Super Capacitor hay DLC - Double Layer Capacitor)
- Nguồn bảo vệ tụ
- Mạch điều khiển trợ giúp nạp - phóng nhanh trong tụ
- Mạch điều khiển đệm giảm tốc độ tăng dòng
- Mạch bảo vệ hệ thống 3.4.4 Mạch báo lỗi
Ba thành phần chức năng chính của pin lithium-ion là các điện cực dương và âm và môi trường phân cực. Nói chung, điện cực âm của pin lithium-ion thông thường được làm bằng carbon. Điện cực dương là một oxit kim loại và chất điện phân là muối lithium trong dung môi hữu cơ.
Vai trò điện của các điện cực xen kẽ giữa cực dương và cực âm tùy thuộc vào hướng dòng điện qua tế bào. Các siêu tụ điện có nhược điểm là khả năng chịu quá áp rất kém nên chúng phải được bảo vệ thật kỹ. Do nhu cầu bảo vệ quá áp chặt chẽ nên DLC phải có mạch bảo vệ quá áp, quá dòng.
Hai bộ điều khiển sạc và xả có nhiệm vụ điều chỉnh dòng sạc và bảo vệ quá áp cho DLC, trong khi bộ sạc thứ cấp có nhiệm vụ chuyển từ quá trình sạc nhanh sang quá trình sạc chậm cho ắc quy của xe. Mạch hỗ trợ điều khiển khởi động và công suất là bước bù quán tính trong hệ thống điều khiển khởi động và khởi động. Cấu trúc của bộ PD đã được trình bày trong tài liệu điều khiển tự động.
- Khái niệm phối hợp đặc tính
- Lý thuyết tối ưu toàn phương
- Xây dựng mô hình tối ưu toàn phương của hệ truyền động Để xác định quan hệ giữa công suất với mômen xoắn của xe, ta dựa vào
- Mô phỏng hệ thống điều khiển trong một số trường hợp hoạt động cơ bản
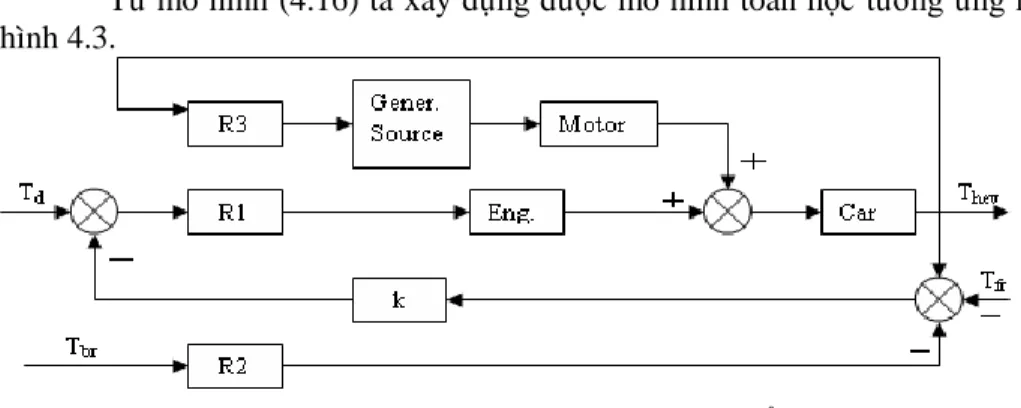
Trên hình 4.3, R1 là bộ điều khiển công suất động cơ, R2 là bộ điều khiển công suất phanh, R3 là bộ điều khiển công suất và nạp máy phát điện, Td là công suất bàn đạp ga, Tbr là công suất phanh, Diev là công suất kéo. tổng của xe, Tfr là lực ma sát tổng cộng. Lực ngang, nghĩa là lực dùng để di chuyển xe theo phương ngang so với tâm đường, là ngẫu nhiên và không được mô tả, chỉ được coi là lực ồn. Để điều khiển theo đặc tính trên Hình 4.2, mô hình điều khiển dựa trên đặc tính tối ưu như Hình 4.4.
Trong đó bộ điều khiển R2 chuyển đổi vị trí bàn đạp phanh thành lực pha phân bố đều trên cả 4 bánh. Mô hình trong Hình 6 được chuyển sang bộ điều khiển R3 sao cho sai số ở nguồn điện đầu vào R3 được giảm thiểu. Do đó, điều khiển công suất chuyển trở lại điều khiển dòng điện thông qua bộ chuyển đổi, cả về cường độ và hướng, để tuân theo các đặc tính công suất bù tối ưu.
Mục đích của bộ điều chỉnh công suất là mô tả công suất cơ theo đặc tính tối ưu như trên hình c. Hình 4.14 cho thấy sự biến đổi công suất động cơ 4S khi lái xe trên đường có lực thay đổi liên tục do phanh và ma sát. Sơ đồ cho thấy khi xe chạy liên tục thì công suất dao động xung quanh giá trị trung bình với thiết kế danh nghĩa của động cơ.
Do tải trọng của xe và sự đồng đều của mặt đường nên tổng công suất cần thiết trong quá trình mô phỏng sẽ lớn hơn công suất định mức của động cơ. Vì vậy, so với đặc tính công suất tối ưu sẽ dư một phần, như hình 4.17.