Loại cần trục: Cổng trục, xe di chuyển cáp, bàn nâng có bản lề. Loại cần cẩu: Cẩu trục bánh lốp tự hành, loại có bánh xe di chuyển.
FEET (ICC);
- Các phƣơng pháp thiết kế của Nhật Bản 1. Cấu tạo chính cầu trục
- Vônmét
- Ampemet
- Phanh hãm dừng
- Các động cơ phụ
- Một số đánh giá về công tác thiết kế
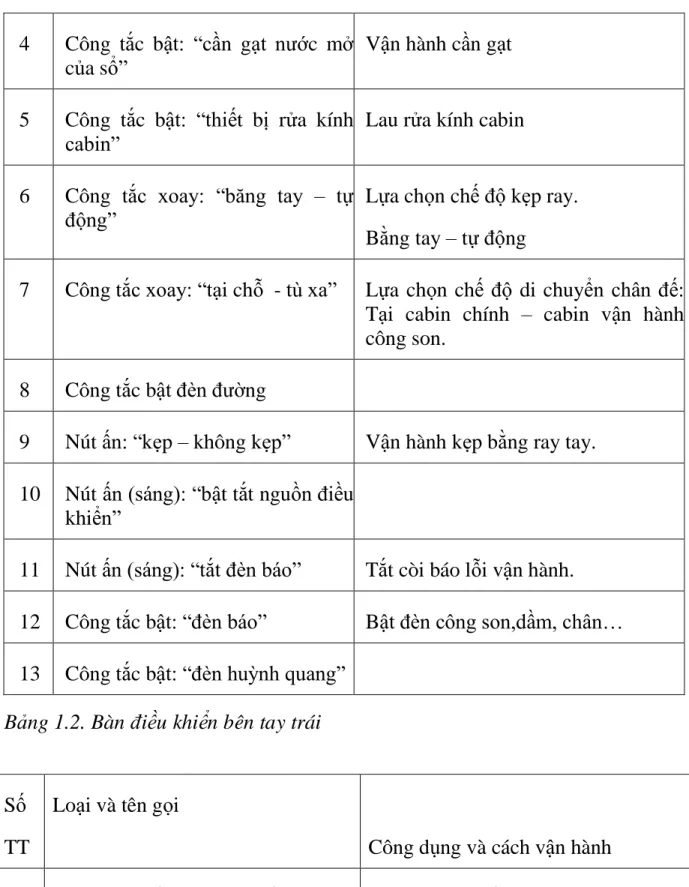
9 Công tắc chọn IDLE-FUL Chọn cài đặt tốc độ động cơ (không tải - có tải). Cuộn dây hút của rơle contactor được chỉ định bởi chính contactor rơle.
CHƢƠNG 2: PHÂN TÍCH VỀ MỘT SỐ CẤU TRÚC ĐIỂN HÌNH TRUYỀN ĐỘNG ĐIỆN CỦA QC VÀ RTG
Hệ thống cấp nguồn của QC và RTG 1. Hệ thống cấp nguồn cần cẩu giàn QC
Kinh tế và kỹ thuật cao, thiết kế chắc chắn, cấu trúc đơn giản và kích thước nhỏ. Độ ổn định nhiệt, cơ và điện được cung cấp bởi cần cẩu và cầu thông thường được lắp ráp để vận hành ngoài trời.
Sơ đồ nguyên lý
Ngoài ra còn bị ảnh hưởng bởi hơi nước mặn nên các thiết kế cơ khí, điện của Nhật Bản rất phù hợp với điều kiện môi trường làm việc.
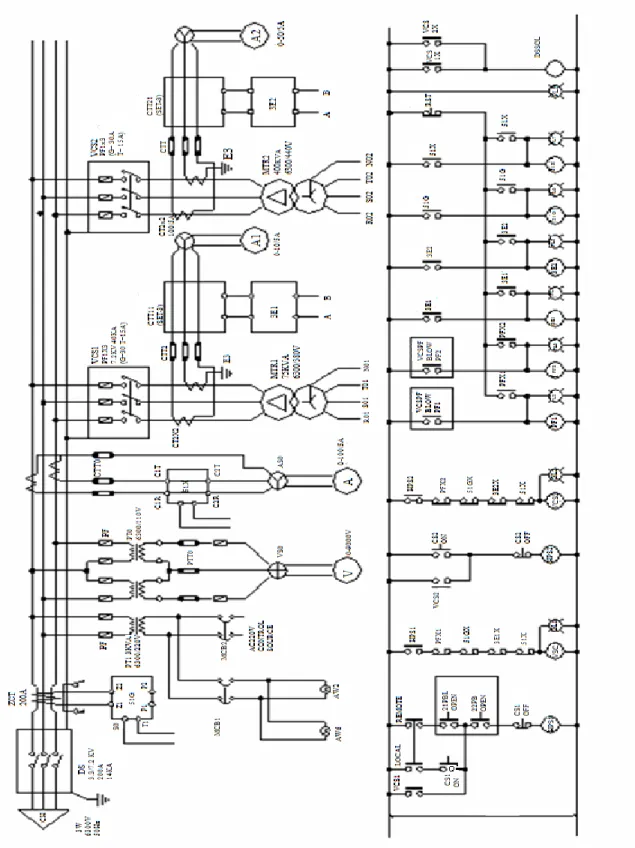
Các phần tử chính của hệ thống cấp nguồn QC
PF: Cầu chì bảo vệ ngắn mạch phía sơ cấp của máy biến áp 1 pha PT1. CS2ON, OFF: Hai nút ấn loại bỏ máy biến áp MTR2 khỏi hệ thống.
Các bảo vệ sơ đồ cấp nguồn
- Hệ thống cấp nguồn độc lập của cầu trục giàn bánh lốp RTG 1. Sơ đồ cấp nguồn
Yêu cầu về hệ thống bảo vệ của hai máy biến áp phải đáng tin cậy và phối hợp với nhau. Nếu xảy ra sự cố ở một máy biến áp, hãy ngắt kết nối cả hai máy biến áp và dừng mọi hoạt động của hệ thống.
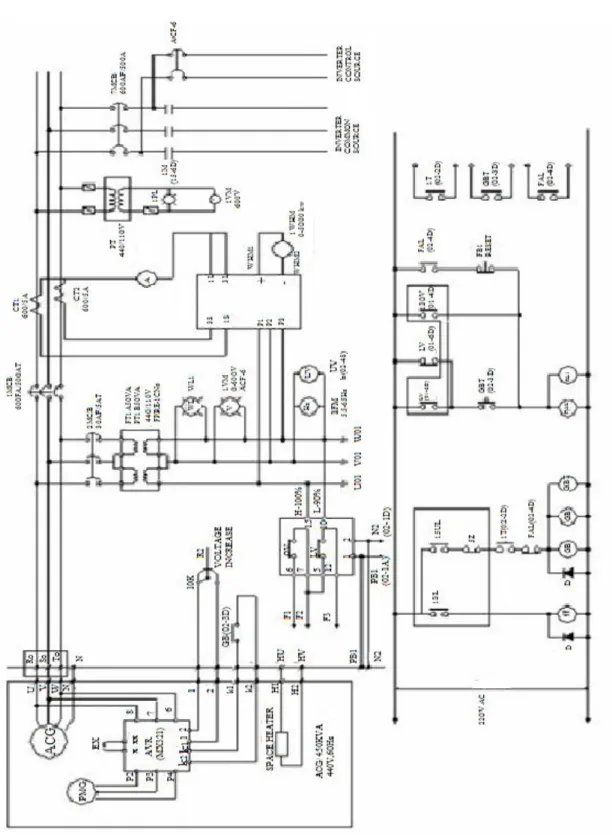
Các phần tử chính của hệ thống cấp nguồn
Việc bảo vệ ngắn mạch và quá tải của cả hai máy biến áp đều được thực hiện theo cách giống nhau, hãy xem xét việc bảo vệ cho máy biến áp MTR2. Bảo vệ ngắn mạch: được thực hiện bằng cầu chì PF 3 pha nối với cuộn sơ cấp của máy biến áp.
Nguyên lý hoạt động
Điện áp đầu vào AVR được lấy từ máy phát và điện áp này được so sánh và điều chỉnh theo mức đặt trước trong AVR. Rơle báo lỗi FAL(02-4D) được cấp điện khi điện áp đầu ra của các pha khác nhau, tiếp điểm OV và LV đóng hoặc khi tần số điện áp đầu ra thấp, tiếp điểm UV đóng.
Các bảo vệ sơ đồ cấp nguồn
- Hệ truyền động điện nâng hạ hàng
- Hệ truyền động điện nâng hạ hàng cầu giàn QC
Nếu điện áp ra máy phát cao hơn mức cho phép thì bộ điều khiển AVR điều khiển cuộn dây kích từ EX để giảm kích thích của máy phát nhằm giảm điện áp ra của máy phát, ngược lại nếu điện áp ra nhỏ hơn cho phép thì cuộn EX tăng. sự kích thích của máy phát điện. Việc thực hiện điều khiển chuyển động của hai cơ chế này phải được kết nối với nhau, tại một thời điểm nhất định chỉ được phép điều khiển một cơ chế. Khi bạn di chuyển cần gạt bên phải trong cabin người lái theo hướng tiến hoặc lùi, cơ cấu nâng sẽ được điều chỉnh theo chiều nâng và hạ.
- Công tắc hành trình tác động khi chiều cao nâng bằng 27.65m
- Ngắt hành trình dừng A
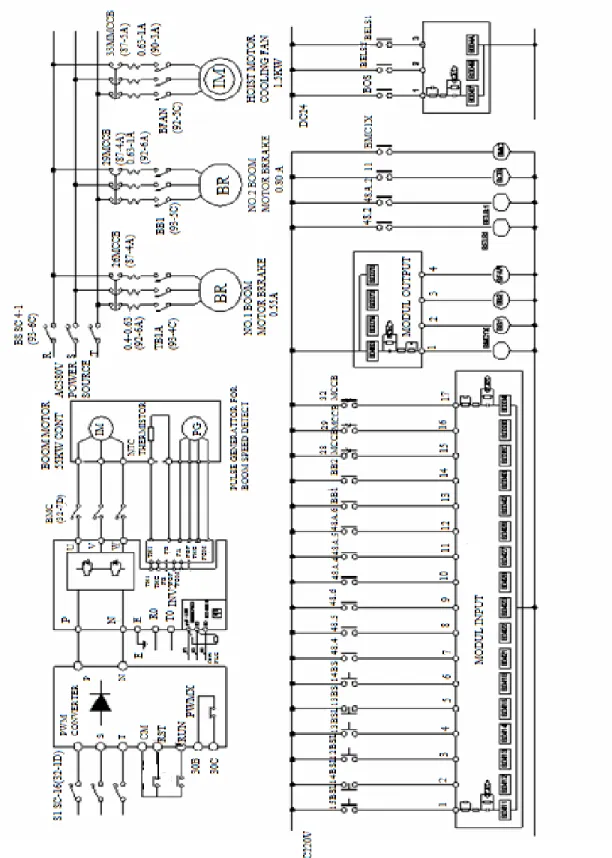
Bảo vệ dầu bôi trơn cho động cơ chính: Nếu áp suất dầu bôi trơn không đủ, tiếp điểm thường mở 15U= 0 thì hệ thống ngừng hoạt động. Bảo vệ bằng 0: được thực hiện bằng công tắc tơ nguồn điện Bảo vệ ngắn mạch: được thực hiện bằng bộ ngắt mạch tự động. HOS, BOS, HETS, EMSX1- 6: Công tắc tơ trung gian bảo vệ đầu móc, quá tốc độ, nối đất và các điều kiện dừng khẩn cấp.
Ngắt hành trình bảo vệ quá tốc độ tời nâng
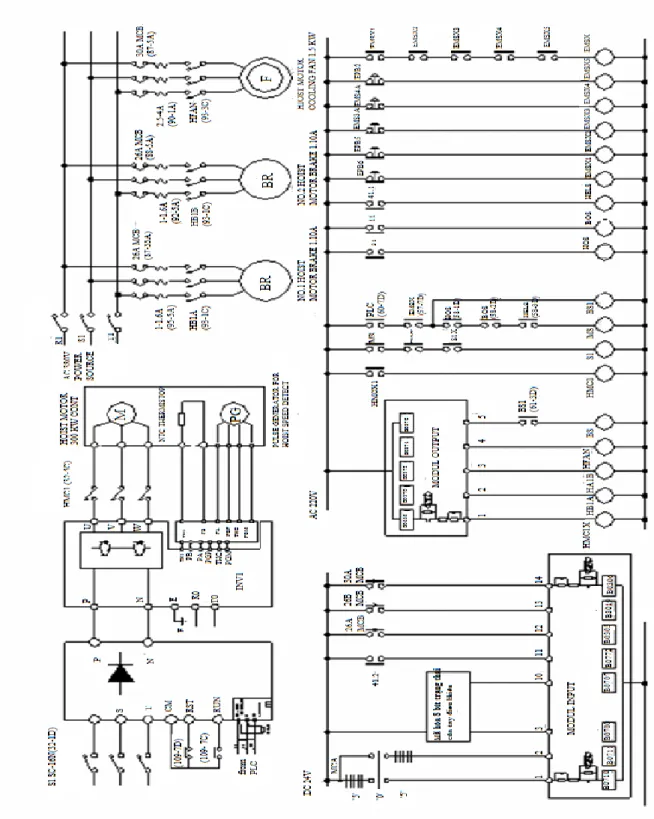
Sau khi hoàn thành mọi thao tác cấp điện cho toàn bộ cầu trục và xác định được trạng thái làm việc với các đèn trên bảng điều khiển, nếu không có vấn đề gì thì phía điện áp cao và nguồn điện điều khiển sẽ có động lực chờ vận hành. PLC xử lý và cung cấp tín hiệu để điều khiển bộ biến tầnPWM nhằm tạo ra điện áp tương ứng với chiều quay thuận hoặc quay ngược của động cơ. Để tăng độ chính xác, hệ thống được xây dựng theo sơ đồ mạch kín có bộ tạo xung.
Các bảo vệ nâng hạ
- Hệ truyền động điện nâng hạ hàng cầu trục giàn RTG
Một động cơ bơm thủy lực dùng để chuyển đổi khung nâng có Pdm = 5,5 kW. 28THR,31THR: Rơle nhiệt bảo vệ quá tải cho quạt làm mát động cơ chống dao động. RST1: Khôi phục chế độ điều khiển ban đầu cho cơ cấu nâng và di chuyển của xe cầu.
Bảo vệ tốc độ nâng dưới định mức
- Cảm biến cuối hành trình nâng (31.1 = 0 khi nâng quá độ cao cho phép)
- Cảm biến cho hệ thống nâng chậm ở gần cuối hành trình (đến gần cuối hành trình khi nâng thì 31.2 = 0)
- Cảm biến cuối hành trình hạ (34.2 = 0 khi hạ xuống quá mức cho phép)
- Cảm biến cho hệ thống hạ chậm ở gần cuối hành trình (đến gần cuối hành trình khi hạ thì 34.1 = 0)
- Cảm biến độ nghiêng (nghiêng phải quá độ nghiêng cho phép thì 35.1 = 0)
- Cảm biến độ nghiêng (nghiêng trái quá độ nghiêng cho phép thì 35.2 = 0)
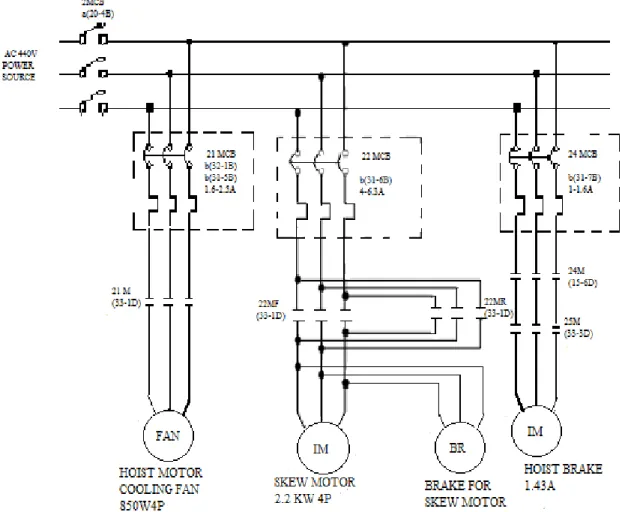
22MCB: Cầu dao cấp nguồn chính cho động cơ phanh mô tơ chống nghiêng. 22MF, 22MR: contactor cấp nguồn chính cho động cơ phanh mô tơ chống nghiêng. 27MCB: Bộ ngắt mạch cung cấp điện cho quạt làm mát cho động cơ chống lắc.
Nguyên lý hoạt động
PLC, PLC nhận tín hiệu và điều khiển bộ biến tần tương ứng để điều khiển điện áp theo tốc độ cài đặt. Việc hãm và dừng hệ thống chính xác đạt được nhờ các cơ cấu hãm và được hãm động học, hệ thống sẽ tiêu tán năng lượng hãm trên điện trở phụ. Sau khi phanh, động cơ hoạt động bình thường ở trạng thái ổn định.
Các bảo vệ nâng hạ
- Hệ truyền động điện di chuyển xe con
- Hệ truyền động điện di chuyển xe con của cẩu giàn QC 1. Sơ đồ nguyên lý
HUS&HLS làm cho các tiếp điểm phụ của nó mở trong mạch PLC, PLC điều khiển hệ thống dừng sự cố bằng nút dừng khẩn cấp: Khi xảy ra sự cố, nếu muốn dừng hệ thống, hãy nhấn nút EPB1...EPB4. Khối CPU xử lý các tín hiệu và cung cấp tín hiệu điều khiển cho biến tần INV2 sao cho điện áp và tần số đầu ra phù hợp. Khi di chuyển cần điều khiển từ vị trí tốc độ cao về vị trí tốc độ thấp xảy ra hiện tượng hãm tái sinh, động cơ trả năng lượng về mạng thông qua các điện trở R1, R2, R3.
Các bảo vệ cho cơ cấu di chuyển xe con
- Hệ truyền động điện di chuyển xe con của cầu trục giàn RTG
- Phần điều khiển
- Cảm biến từ (33.1 = 0 truyền tín hiệu dừng hệ thống)
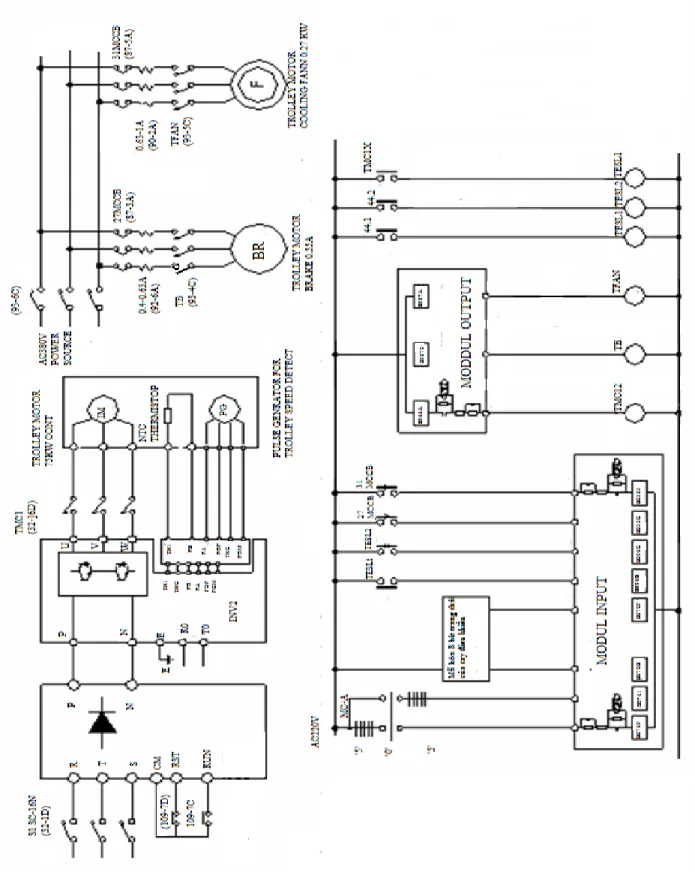
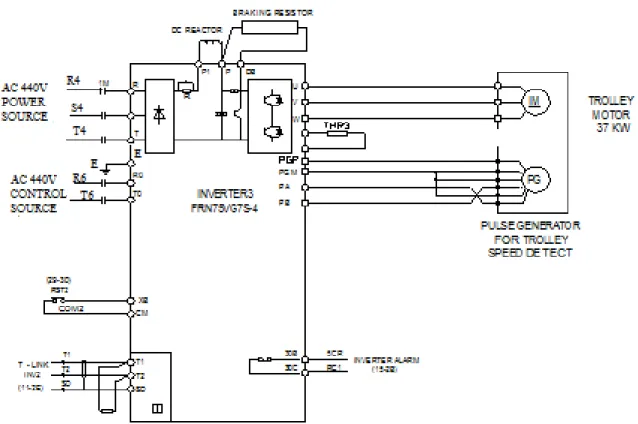
Cơ cấu di chuyển ô tô có mô tơ truyền động được dẫn động bởi biến tần INV3 FRN37VG7S - 4. Đặc điểm của cơ cấu này là mô tơ truyền động hoạt động ở chế độ lặp đi lặp lại trong thời gian ngắn. 3MCB: Tiếp điểm phụ của cầu dao cung cấp điện cho động cơ làm ô tô di chuyển. 4MCB: Tiếp điểm phụ của cầu dao cung cấp điện cho bộ điều khiển biến tần.
Dừng khẩn cấp khi nâng
- Hệ truyền động điện giàn
- Hệ truyền động điện giàn cầu trục QC
Bảo vệ quá tải cho động cơ truyền động: sử dụng nhiệt điện trở có tiếp điểm trong biến tần. Cơ cấu chuyển động motor và cơ cấu giàn nâng có một đặc điểm chung là động cơ truyền động của 2 cơ cấu này được dẫn động bởi bộ biến tần INV2 FRN90 VG75-4. Đối với động cơ dẫn động cơ cấu chuyển động của ô tô, việc điều chỉnh tốc độ và số lùi được thực hiện thủ công ở bộ điều khiển bên trái (trong cabin chính).
Sơ đồ nguyên lý Phần động lực
Động cơ dẫn động cơ cấu nâng công xôn hoạt động ở chế độ ngắn hạn vì việc nâng và hạ công xôn được thực hiện ở đầu hoặc cuối quá trình xử lý tải. Công tắc hành trình 48.3: vị trí nằm ngang của công tắc hành trình. Trạng thái công tắc hành trình ở trạng thái kết nối chốt, chốt nâng lên và chốt hạ xuống.
Công tắc lực ly tâm
Tốc độ nâng giàn được điều chỉnh tự động để quá trình tăng giảm tốc diễn ra êm ái mà không gây rung động cơ học. Bộ mã hóa vị trí cung cấp cho PLC sự kết hợp của các tín hiệu 13 bit vào bộ biến tần để điều chỉnh độ rộng xung và số xung mở các van bán dẫn sao cho điện áp và tần số đầu ra tuân theo một số thuật toán tối ưu. Công xôn dừng ở vị trí nằm ngang, nhấn nút 14BS sẽ có tín hiệu khóa bản lề công xôn.
Các bảo vệ trong hệ thống
- Hệ truyền động điện giàn của cần trục RTG
- Đánh giá thiết kế truyền động điện
Các hệ thống truyền động được điều khiển, giám sát và tự động bảo vệ hệ thống điều khiển chuyển động của cầu trục. Có hệ thống giám sát để kiểm soát chuyển động của cần trục, đồng thời có hệ thống bảo vệ tự động bảo vệ chuyển động của cần trục. Hệ thống điều khiển có bảo vệ toàn bộ lỗi, bảo vệ "không", bảo vệ ngắn mạch, bảo vệ quá tải nhiệt cho động cơ đang chạy và bảo vệ dừng khẩn cấp.
PHÂN TÍCH VỀ ĐIỀU KHIỂN GIÁM SÁT CỦA HỌ CẦN TRỤC CẦU TRỤC QC VÀ RTG
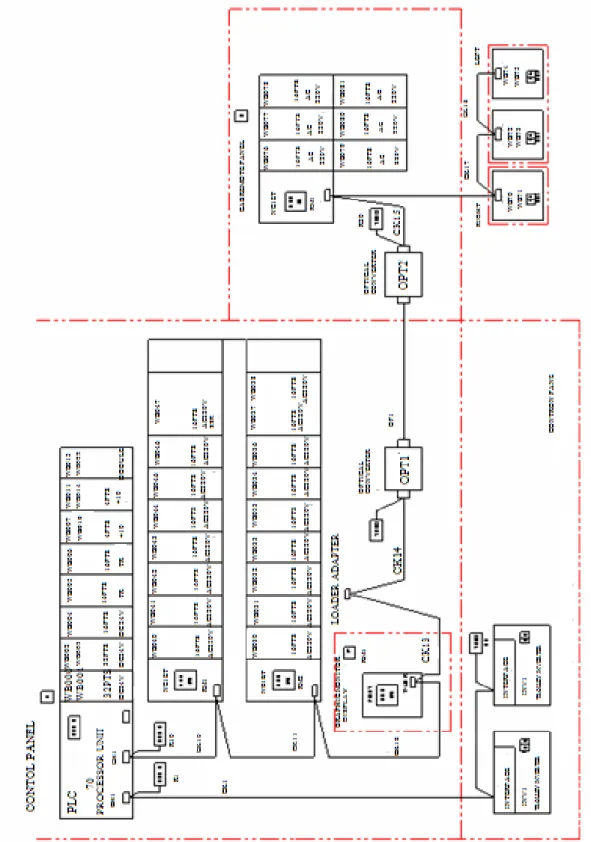
Cấu trúc điều khiển dung PLC của cầu trục RTG
- Thiết bị PLC và tín hiệu I/O trong hệ thống điều khiển cầu trục giàn RTG
- Thiết bị PLC
PHÂN TÍCH KIỂM SOÁT GIÁM SÁT VÒI QC VÀ RTG. Toàn bộ quy trình công nghệ và chương trình vận hành cầu trục được lập trình và cài đặt. Do số lượng tín hiệu số đầu vào và đầu ra rất lớn nên chúng ta chỉ xét đến các tín hiệu chính và cơ bản trong hoạt động của cầu trục.
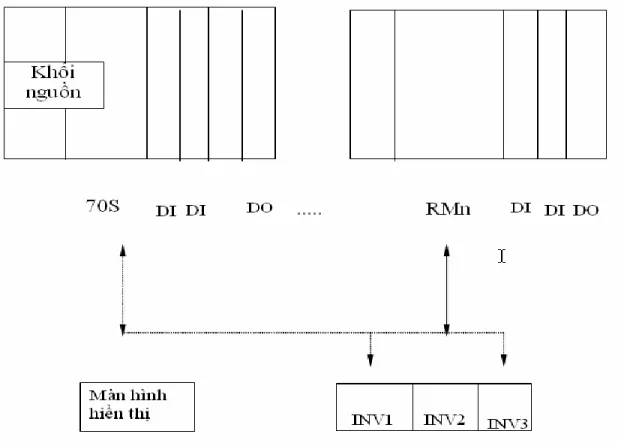
RM8), chịu trách nhiệm thu thập thông tin từ bảng điều khiển bên trái của người vận hành, mỗi khối chứa 2 mô-đun tín hiệu đầu vào 24 VDC, mỗi mô-đun chứa 16 tín hiệu. Lệnh bật nguồn cho cơ cấu di chuyển ô tô và nâng hạ giàn.
Đánh giá về thiết kế điều khiển và giám sát
Hệ thống cho phép bạn điều khiển và giám sát hoạt động của thiết bị được thực hiện trên mỗi cần cẩu. Điều khiển nguồn điện của toàn bộ hệ thống ở chế độ hoạt động và không hoạt động. Hệ thống có nhiều ưu điểm như tạo ra nhiều cấp tốc độ để hệ thống hoạt động êm ái, độ giật nhỏ và khả năng tự động hóa toàn bộ cầu trục cũng như toàn bộ hệ thống điều khiển cho khu vực bốc xếp.