Khoảng cách giữa các pixel được đặt sao cho mắt người không thể phân biệt được ranh giới giữa chúng. Mỗi điểm như vậy được gọi là pixel (PEL: Picture Element) hoặc gọi tắt là Pixel. Pixel là một phần tử của ảnh kỹ thuật số tại tọa độ (x, y) với mức độ xám hoặc màu nhất định.
Kích thước và khoảng cách giữa các pixel được chọn phù hợp để mắt người cảm nhận được tính liên tục về không gian và mức độ xám của hình ảnh kỹ thuật số giống với hình ảnh thật. Độ phân giải của hình ảnh là mật độ điểm ảnh được gán cho hình ảnh kỹ thuật số khi nó được hiển thị. Vì vậy khoảng cách giữa các pixel được chọn sao cho mắt người vẫn có thể nhìn thấy được tính liên tục của hình ảnh.
Đối tượng trong hình 1.2c cũng được thao tác theo cách tương tự, tức là hình 1.2b được phóng to thêm một pixel ở tất cả các cạnh. Việc kéo dài có thể được thực hiện cho đến khi toàn bộ hình ảnh được thay thế bằng các pixel màu đen.
Phép co nhị phân
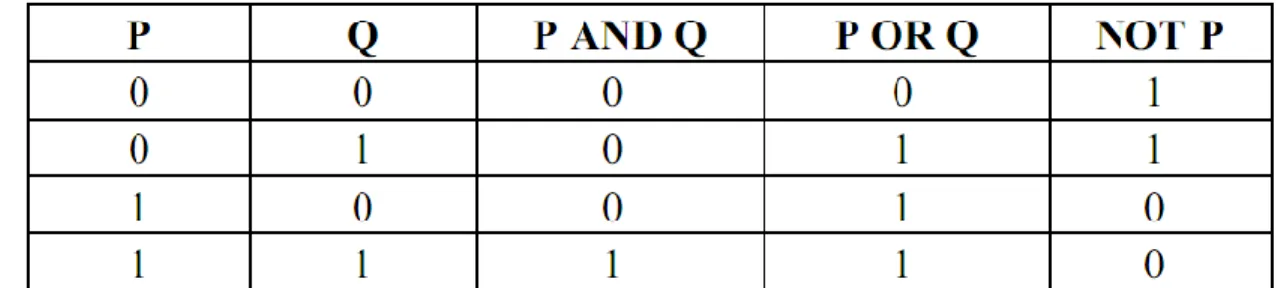
Hãy coi các yếu tố cấu trúc như một khuôn mẫu và chuyển nó thành một bức tranh. Phần tử cấu trúc được di chuyển đến điểm đen trong ảnh. Trong trường hợp này, tất cả các thành phần của cấu trúc khớp với các điểm đen của hình ảnh, do đó kết quả là các điểm đen.
Phần tử kết cấu di chuyển đến pixel tiếp theo trong ảnh và có sự không khớp, dẫn đến điểm trắng. Ở bước tiếp theo, các thành viên của cấu trúc lại khớp nhau nên kết quả là một điểm đen. Nghĩa là phần bù của sự co lại của ảnh A với B được coi là phần bù của A với tập đối diện của B.
Nếu cấu trúc B đối xứng (ở đây chúng ta nghĩ đến sự đối xứng tọa độ) thì nhóm đối xứng của B không thay đổi, nghĩa là Â = A. Hoặc, việc hoàn thành phép rút gọn A theo B được coi là một khai triển. nền của ảnh A (theo quy ước trong ảnh nhị phân rằng: đối tượng trong ảnh được quan sát là các điểm đen, ảnh A bao gồm cả điểm đen và nền).
Phép mở (Opening)
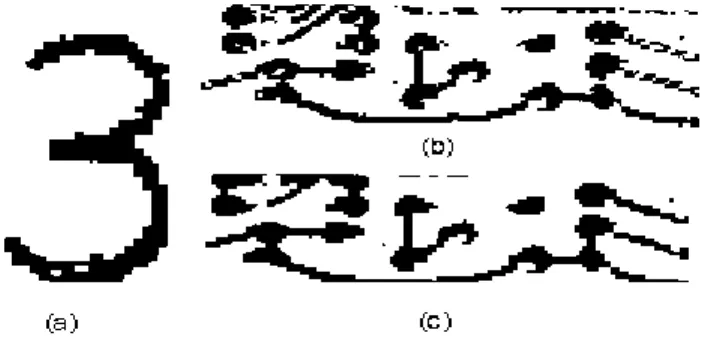
Tương tự như thao tác mở ảnh, nhưng thao tác đóng ảnh trước tiên thực hiện thao tác mở rộng ảnh, sau đó là thao tác thu gọn ảnh và hoạt động trên cùng một phần tử cấu trúc. Trong Hình 1.8: (a) kết quả đóng sử dụng cấu trúc đơn giản; (b) hình ảnh mạch in có ngưỡng và ngắt; (c) Cùng một hình ảnh sau khi đóng, nhưng các đường đứt nét đã được kết nối. Thông thường, hình ảnh mà máy ảnh nhận được là tín hiệu tương tự (máy ảnh ống loại CCIR), nhưng nó cũng có thể là tín hiệu số (loại thiết bị ghép điện tích CCD).
Hình ảnh cũng có thể được nhận từ vệ tinh thông qua cảm biến hoặc ảnh và tranh vẽ được quét trên máy quét. Tiếp theo là quá trình số hóa (Digitalizer) để chuyển đổi tín hiệu analog thành tín hiệu rời rạc (lấy mẫu) và số hóa bằng lượng tử hóa, trước khi chuyển sang giai đoạn xử lý, phân tích hoặc lưu trữ. Do nhiều nguyên nhân khác nhau: có thể do chất lượng của thiết bị thu nhận hình ảnh, do nguồn sáng hoặc do nhiễu nên hình ảnh có thể bị giảm chất lượng.
Giai đoạn tiếp theo là phát hiện các đặc điểm như cạnh (Edge detect), phân đoạn ảnh (Image Segmentation), trích xuất đặc điểm (Feature Extraction), v.v. Cuối cùng, tùy vào mục đích của ứng dụng mà sẽ có giai đoạn nhận dạng, phân loại hoặc đưa ra quyết định khác.
Một số ứng dụng cơ bản
Xử lý hình ảnh cũng thường được sử dụng trong lĩnh vực tội phạm và trong các hệ thống an ninh hoặc kiểm soát truy cập: xử lý hình ảnh cho mục đích nhận dạng dấu vân tay hoặc khuôn mặt cho phép phát hiện nhanh chóng các nghi phạm Tư vấn và nâng cao hiệu quả của hệ thống kiểm soát truy cập và bảo mật cá nhân. Ngoài ra, có thể kể đến những ứng dụng quan trọng khác của kỹ thuật xử lý ảnh tĩnh và động trong đời sống như nhận dạng tự động, nhận dạng mục tiêu quân sự, thị giác máy công nghiệp trong hệ thống điều khiển, tự động nén ảnh tĩnh và ảnh động để lưu trữ và truyền tải trong mạng viễn thông, vân vân.
XƢƠNG VÀ CÁC KỸ THUẬT TÌM XƢƠNG 2.1 Khái niệm xƣơng 2.1 Khái niệm xƣơng
Các hƣớng tiếp cận trong việc tìm xƣơng
- Sơ lƣợc về thuật toán làm mảnh
- Tìm xƣơng dựa trên làm mảnh
- Tìm xƣơng không dựa trên làm mảnh
- Khái quát về lƣợc đồ Voronoi
- Xƣơng Voronoi rời rạc
- Thuật toán tìm xƣơng
Trong thuật toán loại trừ tuần tự, các điểm thuộc đối tượng sẽ được xét theo một thứ tự nhất định (ví dụ: các điểm được xét từ trái sang phải, từ trên xuống dưới). Tất cả các điểm như vậy tạo thành trục trung tâm hoặc trục xương của vật thể. Vì vậy cần tính toán khoảng cách tới tất cả các điểm biên của ảnh.
Ở bước thứ hai, khoảng cách của hình ảnh đã được tính toán và các pixel có giá trị lớn nhất được giả định nằm trên xương của đối tượng. Tập hợp các điểm trong mặt phẳng gần nhất là nửa mặt phẳng H (Pi, Pj) chứa điểm và giới hạn bởi đường trung trực của đoạn thẳng. Chia để trị: Tập hợp điểm biên đầu tiên được chia thành hai tập hợp điểm có kích thước bằng nhau.
Sau đó, thuật toán sẽ tính toán sơ đồ Voronoi cho cả hai tập hợp con các điểm biên. Tuy nhiên, việc chia tập hợp các điểm biên thành hai phần không phải thực hiện một lần mà được lặp đi lặp lại nhiều lần cho đến khi việc tính toán sơ đồ Voronoi trở nên đơn giản. Để có được sơ đồ Voronoi Vor ( ), chúng ta trộn hai sơ đồ trên và xác định lại một số đa giác sẽ bị sửa đổi do ảnh hưởng của các điểm lân cận thuộc sơ đồ kia.
Sau khi tìm thấy và, các điểm cuối của được sử dụng để xây dựng phần tử đầu tiên trong hình trên). Tập hợp pixel không cần nhập ngay từ đầu mà sẽ được quét từng dòng một. Giả sử ở bước i, chúng ta đã thu được sơ đồ Voronoi gồm i-1 hàng điểm tạo Vor.
Tiếp theo, chúng tôi quét một hàng pixel từ tập hợp các điểm ranh giới còn lại. Kết quả là chúng ta sẽ có được một sơ đồ mới và lại thực hiện quét tuyến tính các điểm sinh còn lại v. Hàm VoroLink thực hiện việc trộn hai sơ đồ Voronoi Vor (Si-1) và Vor (Li) lại với nhau để tạo thành Vor (Si).
CẮT TỈA XƢƠNG VỚI DSE 3.1 Giới thiệu 3.1 Giới thiệu
- Phƣơng pháp DCE .1 Giới thiệu
- Ý tƣởng chính
- Rời rạc hóa đƣờng cong với DCE
- Cắt tỉa xƣơng với DCE
- Phƣơng pháp DSE .1 Ý tƣởng chính
- Thuật toán DSE
- Tác giả khởi tạo các trọng số cho tất cả các nhánh xương cuối (i = 1,2,…., ) dựa trên xương gốc
- Loại bỏ nhánh xương cuối với trọng số thấp nhất và có được xương mới
- Đặt k=k+1 và quay lại bước 2
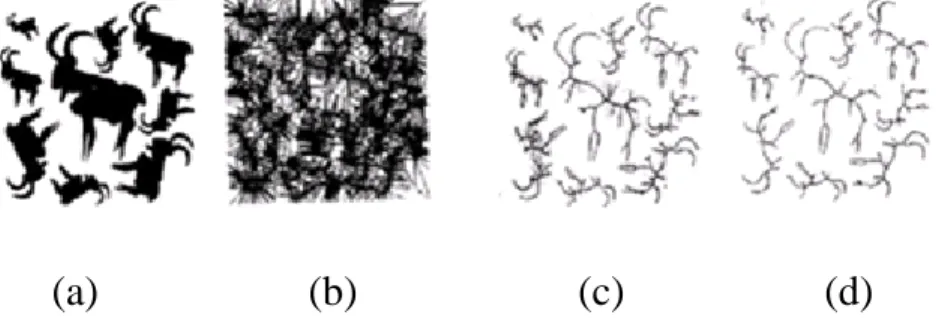
Ở phương pháp này, tác giả loại bỏ những nhánh xương ít liên quan nhất đến việc phục hồi hình dạng. Cắt tỉa xương (a) chú ý phân chia đường viền do 5 điểm ngẫu nhiên trên đường viền ở (b) và (c). Cụ thể, việc loại bỏ đỉnh lồi v khỏi Pn-k bằng DCE mang lại Pn-(k+1) để hoàn thành việc loại bỏ các nhánh xương kết thúc bằng v.
Nhánh xương màu xanh trong hình (a) kết thúc tại C vẫn tồn tại vì nó tiếp xúc với đường tròn lớn nhất trên hai đoạn DCE khác nhau là các cung (A, C) và (C, D). Nhánh xương xanh trong Hình 3.6(b) kết thúc ở đỉnh P là một phần của xương nếu chỉ có đỉnh lõm của đa giác đơn (thể hiện bằng màu đỏ) được sử dụng để xác định các đoạn DCE. Nhưng nhánh xương kết thúc tại P đã bị loại bỏ trong Hình 3.6(c) và được xác định bằng cách sử dụng các đỉnh lồi của một đa giác đơn giản, cho phép cắt tỉa nhanh hơn các nhánh xương không liên quan.
Do đó, tất cả các nhánh xương kết thúc ở đỉnh UI đều bị loại bỏ. Mặc dù các đường gờ từ DCE có thể tỉa bớt xương để tạo ra cấu trúc xương mới nhưng nó cũng có thể tạo ra các nhánh xương không liên quan, được minh họa trên Hình 3.7. Các đỉnh lồi giống nhau có thể tạo ra các nhánh xương khác nhau với mức độ quan trọng khác nhau.
Tuy nhiên, bốn nhánh xương xanh ở cuối đó lại mang một ý nghĩa khác. Nhánh xương kết thúc bằng D ít quan trọng hơn và có thể bị loại bỏ. Do đó, phần lõm bên trong hình có các đỉnh C và D làm giảm đáng kể tầm quan trọng của các nhánh xương kết thúc ở các đỉnh lồi C và D.
Nhánh nội mạc là phần xương nằm giữa nội mạc và điểm nối gần. Về mặt hình thức, nhánh xương tận cùng P(li, f(li)) là đường xương ngắn nhất giữa li và f(li). Việc loại bỏ nhánh đầu cuối sẽ không làm thay đổi cấu trúc liên kết của khung.
Các nhánh xương ít đóng góp vào việc khôi phục lại hình dạng ban đầu sẽ bị loại bỏ trước tiên. Loại bỏ nhánh chân cuối cùng có trọng lượng thấp nhất và lấy nhánh chân mới: chân mới:.

KẾT QUẢ THỰC NGHIỆM 4.1 Môi trƣờng cài đặt 4.1 Môi trƣờng cài đặt
Giao diện chƣơng trình
So sánh kết quả tìm xƣơng với các phƣơng pháp DCE
Hiệu quả của việc sử dụng ngƣỡng (threshold)
KẾT LUẬN