Nguyễn Quốc Tuấn, Khoa Điện tử Viễn thông Trường Đại học Bách Khoa, Phó Giáo sư, Tiến sĩ. Cuối cùng, chúng tôi xin cảm ơn Trường Đại học Kỹ thuật đã hỗ trợ tài chính để nhóm tác giả có điều kiện biên soạn cuốn giáo trình này.
GIỚI THIỆU VỀ XỬ LÝ TÍN HIỆU SỐ
- Tín hiệu là gì?
- Hệ thống là gì?
- Xử lý tín hiệu
- Công nghệ DSP
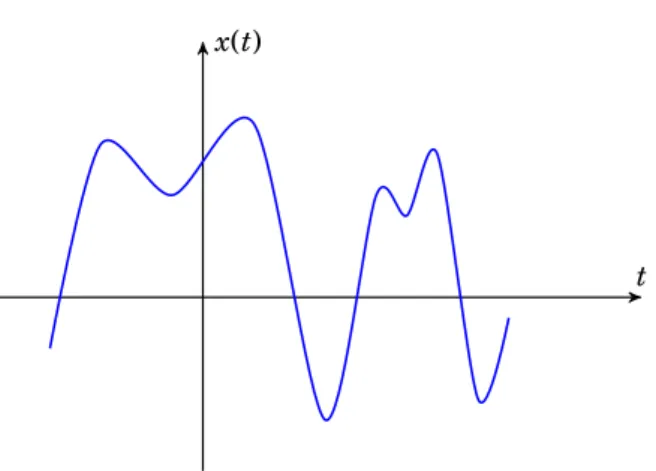
Trong Hình 1.5, tín hiệu tương tự x(t) sẽ được số hóa để thu được tín hiệu x(n) và được xử lý bằng bộ lọc kỹ thuật số để thu được đầu ra y(n). Những máy tính xử lý tín hiệu số này được gọi là Bộ xử lý tín hiệu số (DSµP)*.
SỐ HÓA TÍN HIỆU TƯƠNG TỰ
- Mở đầu
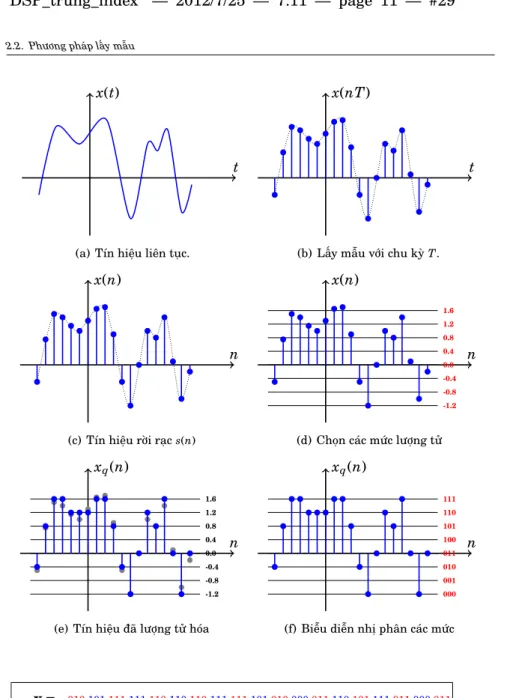
- Phương pháp lấy mẫu
- Lấy mẫu thực tiễn
- Lượng tử hóa
- Mã hóa và biểu diễn nhị phân
- Kết luận
Các điều kiện đảm bảo sự hoàn hảo này được gọi là điều kiện lấy mẫu tín hiệu. Hai điều kiện này được gọi là định lý lấy mẫu Nyquist và được tóm tắt như sau: Tín hiệu x(t) và tín hiệu.
Bài tập chương 2
Xác định tốc độ bit và độ phân giải khi lấy mẫu tín hiệu 1 V thay đổi nếu tốc độ lấy mẫu FS = 40 mẫu/giây và sử dụng ADC 8 bit. Xác định tốc độ bit và độ phân giải khi lấy mẫu tín hiệu trong khoảng từ 0 đến 5 V khi tốc độ lấy mẫu FS = 100 mẫu/giây và sử dụng ADC 12 bit.
TÍN HIỆU VÀ HỆ THỐNG RỜI RẠC
Mở đầu
Điều này cho thấy rõ rằng việc xử lý tín hiệu rời rạc xd(n) hoặc xử lý tín hiệu tương tự x∆(t) là hoàn toàn tương đương nhau. Lấy biến đổi Laplace hai chiều của tín hiệu tương tựx∆(t) như định nghĩa trong (3.3) cho chúng ta.
Tín hiệu rời rạc
- Một số tín hiệu quan trọng
- Phân loại tín hiệu
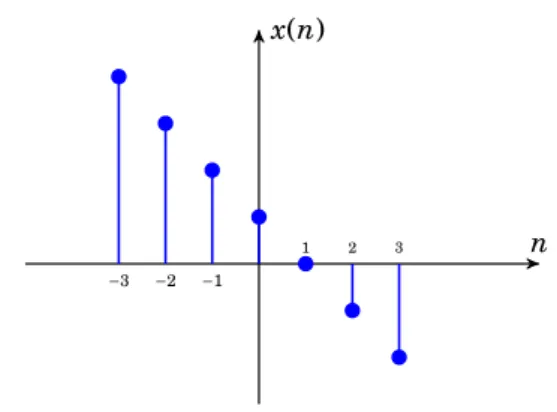
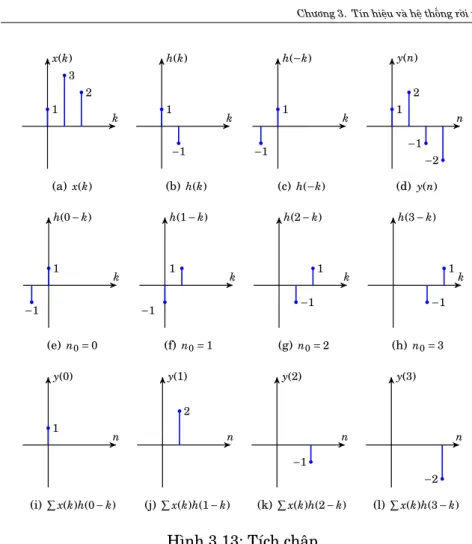
Tín hiệu chẵn còn được gọi là tín hiệu đối xứng, được minh họa trong Hình 3.6(a). Tích của hai tín hiệu x1(n) và x2(n) là tín hiệu y(n) có mẫu tại mỗi thời điểm n được xác định bằng tích của hai mẫu x1(n) và x2(n) đồng thời:.
Hệ thống rời rạc
- Mô hình hệ thống
- Phân loại hệ thống
- Kết nối các hệ thống
Ngược lại, nếu mẫu của đầu ra y(n) tại thời điểm n phụ thuộc vào nhiều mẫu tại các thời điểm khác nhau của đầu vào x(n), thì hệ thống được gọi là hệ thống động hoặc hệ thống bộ nhớ. Một hệ thống được coi là nhân quả khi tín hiệu đầu ra xuất hiện sau tín hiệu đầu vào.

Hệ thống tuyến tính bất biến
- Ý nghĩa của đáp ứng xung và tích chập
- Đáp ứng xung của hệ thống nối tiếp
- Hệ thống tuyến tính ổn định
Tuy nhiên, nếu T1 và T2 là tuyến tính và bất biến thì chúng ta có thể chuyển đổi vị trí của chúng mà không làm thay đổi đầu ra của hệ thống nối tiếp. Nói cách khác, chúng ta có thể sử dụng h(n) để tính toán đầu ra của hệ thống khi bị kích thích bởi một tín hiệu nào đó. Vì vậy, chúng ta có thể kết luận rằng một hệ thống tuyến tính hoàn toàn bất biến được đặc trưng bởi đáp ứng xung của nó.
Nếu hệ thống được cảm ứng thì đáp ứng xung của nó chỉ xảy ra khi nó bị kích thích bởi xung Kronecker δ(n) ở đầu vào, tức là. h(n)=0nếun<0. Xét hai hệ thống tuyến tính bất biến nối tiếp T1 và T2 có đáp ứng xung tương ứng h1(n) và h2(n).
Biến đổi Z và áp dụng vào hệ thống tuyến tính bất biến
- Biến đổi Z ngược
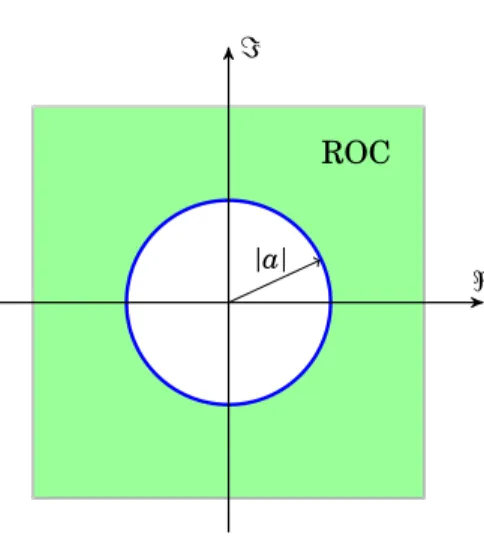
Như vậy, vùng hội tụ của tín hiệu phản nhân quả nằm trong đường tròn bán kính |b| của mặt phẳng z. Từ bài toán, ta biết vùng hội tụ của X(z) là vùng nằm ngoài đường tròn bán kính 0,5 và do đó x(n) là tín hiệu nhân quả. Có thể thấy vùng hội tụ là một vành nên tín hiệu x(n) không có tính nhân quả.
Nếu hệ thống là nhân quả thì vùng hội tụ nằm ngoài đường tròn bán kính 0,5. Nếu hệ thống phản nhân quả thì vùng hội tụ nằm trong đường tròn có bán kính 0,5.
Biến đổi Fourier theo thời gian rời rạc
- Định nghĩa biến đổi Fourier theo thời gian rời rạcrạc
- Áp dụng biến đổi Fourier theo thời gian rời rạc vào hệ thống tuyến tính bất biến
- Liên hệ giữa biến đổi Z và biến đổi Fourier theo thời gian rời rạctheo thời gian rời rạc
Phép biến đổi Fourier đóng một vai trò rất quan trọng trong lý thuyết hệ thống tuyến tính bất biến. Thật vậy, hãy xem xét một hệ thống rời rạc tuyến tính bất biến có đáp ứng xung h(n). Kết quả (3.81) cho thấy khi chúng ta tạo ra một hệ tuyến tính bất biến rời rạc với tín hiệu hài phức = −∞, đầu ra sẽ có dạng giống như tín hiệu hài ejnω0 nhưng biên độ được khuếch đại bởi hệ số H(ω0), do đó H(ω0) được gọi là độ lợi phức của hệ.
Điều này chỉ có thể thực hiện được nếu hệ thống tuyến tính bất biến rời rạc ổn định. Tóm lại, H(ω) là độ lợi phức của hệ tuyến tính bất biến rời rạc.
Kết luận
Khi hệ thống bị kích thích bởi tín hiệu hài có tần số gócω, tín hiệu này được khuếch đại bởi H(ω), mức tăng này thay đổi theo tần số gócω, do đó H(ω) còn được gọi là đáp ứng tần số của hệ thống. Biến đổi Fourier chỉ tồn tại nếu vòng hội tụ của X(z) chứa vòng thống nhất. Đối với một hệ nhân quả ổn định thì điều kiện này luôn được đáp ứng.
Chúng ta thấy rằng có một mối liên hệ chặt chẽ giữa biến đổi Fourier và biến đổi Z thông qua phép biến đổi z=ejω. Thiết kế một hệ thống theo tinh thần của sách giáo khoa này có nghĩa là tìm một hệ thống H(z) sao cho đáp ứng tần số H(ω) của nó thỏa mãn các điều kiện đặc tả của hệ thống được thiết kế.
Bài tập chương 3
CẤU TRÚC CÁC BỘ LỌC SỐ
- Hệ thống ARMA
- Sơ đồ khối của hệ thống
- Dạng trực tiếp của hệ thống ARMA
- Dạng trực tiếp II
- Dạng nối tiếp và song song của hệ thống ARMAARMA
- Dạng nối tiếp
- Dạng song song
- Dạng chéo của hệ thống MA có hệ số đối xứngxứng
- Ảnh hưởng của lượng tử hóa thông số
Vì vậy, đây là hệ thống FIR và hệ thống này là nhân quả. 4.5) Đáp ứng xung của hệ thống này có độ dài vô hạn nên nó là hệ thống IIR. Phần tiếp theo sẽ trình bày chi tiết cách xây dựng các cấu trúc hệ thống chung.
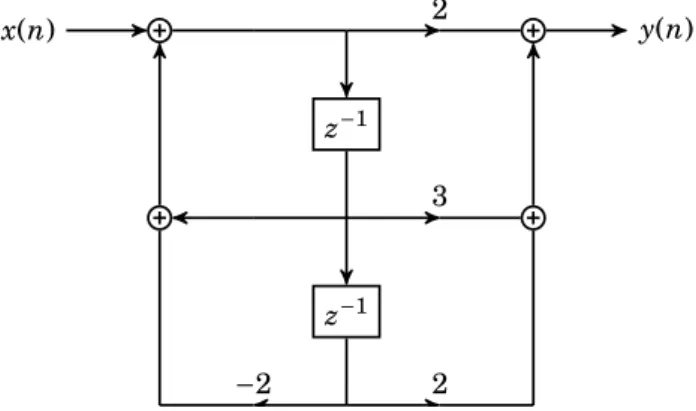
Sử dụng các dịch chuyển độ trễ thống nhất, bộ khuếch đại và bộ cộng, có thể xây dựng sơ đồ hệ thống H1(z),H2(z) và kết nối chúng với getH(z) như trong Hình 4.4. Cấu trúc nối tiếp để thực hiện hệ thống này được minh họa trong Hình 4.8.

Bài tập chương 4
Xác định đáp ứng tần số biên độ và đáp ứng tần số pha của bộ lọc này. Cho hệ thống có cấu trúc cài đặt trực tiếp II như hình 4.16. Cho một hệ thống LTI có sơ đồ nghiệm cực gốc bằng 0 như trong Hình 4.17. a) Xác định hàm truyền của hệ thống này.
Cho một hệ thống LTI có sơ đồ nghiệm cực gốc bằng 0 như trong Hình 4.18. a) Xác định cấu trúc triển khai trực tiếp của hệ thống.
THIẾT KẾ BỘ LỌC SỐ IIR
Lọc tương tự
- Các phương pháp xấp xỉ Butterworth và ChebychevChebychev
- Phép biến đổi một bộ lọc thông thấp thành bộ lọc thông dảilọc thông dải
- Phép biến đổi một bộ lọc thông thấp thành bộ lọc triệt dảilọc triệt dải
- Phép biến đổi một bộ lọc thông thấp thành bộ lọc thông caolọc thông cao
- Đáp ứng tần số của bộ lọc theo bậc
Ví dụ 5.2 Xác định hàm truyền của bộ lọc Butterworth bậc 3 với tần số cắtΩc=1rad/s. Ω1: Tần số cắt thấp hơn của bộ lọc thông dải tương ứng với −λr của bộ lọc thông thấp. Ω3: Tần số cắt trên của bộ lọc thông dải tương ứng với λr của bộ lọc thông thấp.
Thiết kế bộ lọc số IIR. và là hàm truyền của bộ lọc thông dải. Sau đây là một ví dụ minh họa phương pháp thiết kế bộ lọc thông dải.
Phương pháp đáp ứng bất biến
- Thiết kế theo đáp ứng xung bất biến
Gọi G(p) là hàm truyền của bộ lọc tương tự đã chọn và H(z) là hàm truyền của bộ lọc số chúng ta cần thiết kế. Gọi g(t) và h(n) lần lượt là đáp ứng xung của bộ lọc tương tự và bộ lọc số. Dưới đây là một số ví dụ về thiết kế bộ lọc IIR sử dụng phương pháp đáp ứng xung bất biến trong miền thời gian.
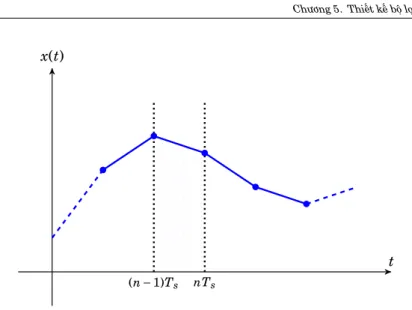
Đặt hst(n) và gst(t) lần lượt là đáp ứng bước của bộ lọc số và bộ lọc tương tự. Ví dụ 5.10 (Thiết kế đáp ứng cầu thang bất biến) Chúng tôi sử dụng phương pháp đáp ứng cầu thang bất biến để thiết kế bộ lọc kỹ thuật số thông thấp tương ứng với đặc tả trong Ví dụ 5.9.

Phương pháp biến đổi song tuyến tính
- Biến đổi song tuyến tính
- Thiết kế theo biến đổi song tuyến tính
Phương pháp đầu tiên là áp đặt giá trị đáp ứng tần số của bộ lọc kỹ thuật số ở tần số nhất định. Giả sử chúng ta muốn có đáp ứng tần số tương tự và đáp ứng tần số. Ví dụ 5.12 Sử dụng phương pháp biến đổi song tuyến tính để thiết kế bộ lọc thông thấp kỹ thuật số dựa trên bộ lọc Butterworth tương tự bậc hai với tần số cắt 3 dB là 50 Hz, biết rằng tần số lấy mẫu là 500 Hz.
Sử dụng kết quả trên để biến đổi hàm G(p), ta có hàm truyền của bộ lọc số tương ứng như sau. Tiêu chí quan trọng nhất là đáp ứng tần số thông thấp trông giống như đáp ứng tần số của bộ lọc analog tương ứng.
Thiết kế bộ lọc số thông dải
Có, kết quả với bộ lọc tương tự cho thấy rằng ở mức gợn sóng 0,5 dB, bộ lọc Chebyshev bậc 5 có độ suy giảm 43 dB ở tần số νa = 0,2. Hằng số C được chọn sao cho Ω2 của bộ lọc thông dải tương tự tương ứng với tần số f¯2 của bộ lọc thông dải kỹ thuật số. Biểu thức (5.87) là một công cụ được sử dụng phổ biến trong việc thiết kế các bộ lọc thông dải số.
Chúng ta biết rằng đáp ứng biên độ của bộ lọc tương tự đối xứng với trục tung. Kết quả lọc tương tự cho thấy bộ lọc Butterworth thông thấp tương tự bậc 2 phù hợp với hạn chế này vì đáp ứng tần số ở λa=3,7527638 nhỏ hơn 23dB.
Thiết kế bộ lọc số triệt dải
Do đó, thứ tự của bộ lọc thông dải kỹ thuật số sẽ gấp đôi thứ tự của bộ lọc thông thấp mà chúng ta sử dụng để chuyển đổi. Hệ thống xử lý tín hiệu số hoạt động với tần số lấy mẫu là 1 kHz. Vì hàm truyền của bộ lọc số là bậc 2 nên hàm truyền của bộ lọc tương tự là bậc 1 và có dạng
Tần số cắt của bộ lọc số tương ứng với 95Hz và 105Hz là.

Thiết kế bộ lọc số thông cao
Bài tập chương 5
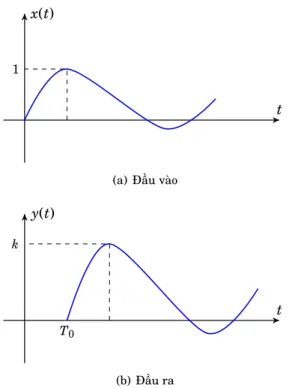
Đầu vào là tín hiệu rời rạc và được chuyển đổi thành tín hiệu liên tục bằng bộ lọc lưu trữ bậc 0. Tín hiệu này được đưa đến hệ thống tương tự có hàm truyền G(p) và đầu ra được lấy mẫu thành tín hiệu y(n).

THIẾT KẾ BỘ LỌC SỐ FIR
Phương pháp cửa sổ
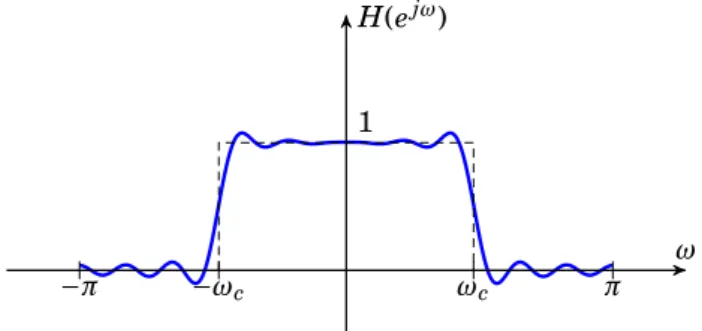
- Bộ lọc lý tưởng
- Phương pháp thiết kế cửa sổ
Đáp ứng tần số của hai cửa sổ này một lần nữa được thể hiện bằng đơn vị dB trong Hình 6.7. Chúng ta thấy rằng cửa sổ hình chữ nhật gây ra các gợn sóng có tác động đáng kể đến đáp ứng tần số. Thông thường, thiết kế cửa sổ được coi là tối ưu dựa trên các tiêu chuẩn nhất định.
Một số cửa sổ khác được thiết kế để có một số đặc tính mong muốn. Một số điểm cần lưu ý trong quá trình thiết kế bằng phương pháp cửa sổ.